


< Back to Automotive Simulation Toolchain
Author: Johnny Liu, CEO at Dowway Vehicle
Published: March 16, 2026
Last Updated: March 16, 2026
Reviewer Note: Prepared from the technical source report supplied for this article
Content Type: Technical industry analysis
Jurisdiction Note: This article discusses automotive engineering workflows in a global setting, with added attention to China-market localization and local engineering practice.
Disclaimer: This article is for engineering education and industry discussion. It is not legal, certification, or regulatory advice.
- Direct Answer
- 1. Multidisciplinary Heterogeneous Co-Simulation
- 2. Full Requirements Traceability Based on MBSE
- 3. Modular Architecture Design and Fast Iteration
- 4. Seamless Integration With the Automotive Toolchain
- System Architecture Design Module
- Requirements Management and Traceability Module
- Multidisciplinary Co-Simulation Module
- Optimization and Analysis Module
- Reporting and Collaboration Management Module
- Step 1: Import and Break Down Vehicle-Level Targets
- Step 2: Build Functional and Physical Architectures
- Step 3: Run Multidisciplinary Co-Simulation
- Step 4: Optimize and Select the Best Architecture
- Step 5: Trace Requirements and Generate Reports
- Step 1: Define and Allocate Functional Requirements
- Step 2: Build the Controller Architecture and Define Interfaces
- Step 3: Simulate Fault Cases for Functional Safety Validation
- Step 4: Optimize the Architecture
- Step 5: Generate Compliance-Oriented Outputs
- Model Standardization
- Requirement Quality
- Reasonable Simulation Scenarios
- Team Collaboration Management
- Deep Toolchain Integration
- What is Simcenter System Architect and how does it fit into the automotive MBSE toolchain?
- How does Simcenter System Architect support multidisciplinary co-simulation?
- Why is MBSE important for modern automotive system development?
- How does Simcenter System Architect integrate with other engineering tools?
- What are the main automotive use cases for Simcenter System Architect?
- Author Bio
Direct Answer
Simcenter System Architect, or SSA, is a system-level architecture and co-simulation platform in the Siemens Simcenter portfolio. For automotive teams, it works as the bridge between requirements, functional design, physical architecture, simulation, optimization, and verification. That matters because modern vehicles are no longer simple mechanical products. They are tightly linked mechanical, electrical, electronic, and software systems that need to be designed and checked as one whole.
- Vehicle development has shifted from isolated subsystem work to full cross-domain system engineering.
- SSA helps connect requirements, architecture, simulation models, and validation in one workflow.
- Its main strengths are heterogeneous co-simulation, full traceability, modular design, and toolchain integration.
- It is well suited for EV powertrain work, thermal management, ADAS, and domain controller validation.
- The Chinese version lowers the learning barrier for local engineering teams and supports local standards and collaboration.
Modern vehicle programs are getting harder to manage. Electrification, intelligent driving, connectivity, and software-heavy platforms have pushed vehicle complexity far beyond the old document-based workflow. Many teams still work in separate tools and separate files, which leads to information silos, slow iteration, and late integration problems.
That is where model-based systems engineering, or MBSE, becomes useful. It gives teams a way to connect requirements, system functions, physical design, simulation, and verification in one chain. In the report you provided, Simcenter System Architect stands at the center of that chain. It is presented as the hub that links concept design, detailed engineering, simulation verification, and design iteration across the automotive toolchain.
Why Automotive Teams Need a System-Level Platform
The biggest change in automotive development is not just that vehicles have more software. It is that the product itself has become a mixed system. A modern vehicle combines:
- mechanical systems such as chassis and body,
- electrical systems such as batteries and motors,
- electronic systems such as ECUs and sensors, and
- software systems such as control logic and embedded functions.
These parts do not work on their own. They affect one another all the time. A thermal problem can change power output. A control strategy can change battery temperature. A communication delay can change braking response. That is why traditional single-domain simulation tools are no longer enough by themselves.
The report identifies three common problems in older workflows:
- information silos between teams,
- low iteration speed, and
- weak connection between design and real performance.
SSA is positioned as the tool that solves those problems by using system architecture as the organizing layer. Instead of letting each discipline work in isolation until late integration, it lets the team build one system view and run cross-domain validation earlier.
What Simcenter System Architect Does in the Automotive Toolchain
SSA is part of the Siemens Simcenter toolchain, but its role is different from a single solver or a single domain simulator. It does not focus on one discipline only. Its role is to connect:
- requirements,
- functional architecture,
- physical architecture,
- simulation models,
- validation scenarios, and
- reporting outputs.
That is why it fits well into automotive MBSE. In a normal vehicle program, the workflow moves from concept definition to subsystem design, then to simulation, validation, and handoff into lifecycle management. SSA sits across those steps and helps keep the logic connected.
This matters most when teams need to compare architecture options early, before hardware prototypes are available. A static diagram cannot do that. A disconnected spreadsheet cannot do that. A system architecture platform with co-simulation can.
Core Advantages of Simcenter System Architect for Automotive Engineering
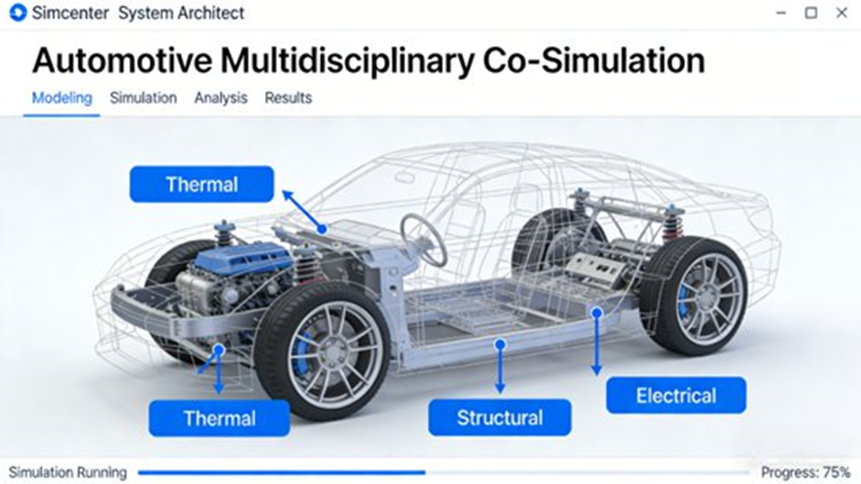
1. Multidisciplinary Heterogeneous Co-Simulation
The report puts strong emphasis on this point, and for good reason. Automotive development pulls in many disciplines at once. Chassis engineers, powertrain teams, battery teams, controls engineers, software teams, and E/E architects often use different tools and different model formats.
SSA supports heterogeneous model integration through standard interfaces such as FMI/FMU and Modelica SSP-style workflows. That means models from tools like:
- Simcenter Amesim,
- MATLAB/Simulink, and
- Modelica-based environments
can be brought into one system-level simulation architecture without heavy rework of the original models.
This is a big gain for automotive engineering. Take an electric vehicle as an example. The battery thermal model may sit in Amesim, the motor control strategy may be built in Simulink, and other system models may come from another environment. With SSA, those models can run together in one setup so engineers can study energy flow, thermal behavior, and control response at the same time.
That makes it easier to catch system-level problems before hardware integration starts.
2. Full Requirements Traceability Based on MBSE
The report also stresses a second problem in automotive development: requirements often get separated from design and validation. Teams may start with a requirements document, then move into design tools and simulation tools that are not tightly linked to the original intent. When something goes wrong, tracing the cause back to the right requirement becomes slow and messy.
SSA addresses that by supporting requirement import, breakdown, allocation, and traceability. A top-level vehicle target can be split into subsystem and component targets, then tied to architecture models, simulation cases, and validation results.
A good example from the report is an automatic emergency braking target such as:
AEB response time ≤ 100 ms
That requirement can be assigned across:
- perception,
- decision, and
- actuation subsystems.
From there, engineers can check whether the architecture and the simulation results satisfy the original target. If not, they can trace backward from the failed result to the exact subsystem or parameter that caused the issue.
3. Modular Architecture Design and Fast Iteration
Vehicle programs rarely move forward with one fixed architecture from the first day. Teams compare concepts, change component parameters, replace design blocks, and run tradeoff studies again and again.
SSA provides a graphical modular design environment where engineers can build architecture blocks, connect them through standard interfaces, and change them quickly. The report points out that this is useful for both concept work and detailed engineering because it supports:
- drag-and-drop architecture building,
- modular components,
- standard interfaces,
- parameterized modeling, and
- sensitivity analysis.
This makes design iteration faster. Engineers can adjust battery capacity, motor power, control parameters, suspension stiffness, or another key value and study how the whole vehicle responds.
The report even notes that Hyundai used SSA-based parameter optimization to cut one optimization process from a week down to 15 minutes. That kind of speed matters when architecture decisions need to move quickly.
4. Seamless Integration With the Automotive Toolchain
Another strong point in the report is SSA’s place inside the wider automotive development toolchain. It is designed to connect with:
- NX for CAD data,
- Simcenter 3D for CAE work,
- Simcenter Testlab for test and validation data,
- Teamcenter for PLM and lifecycle management, and
- Git or file-based workflows for model governance.
That means architecture models, simulation data, requirements, reports, and lifecycle records can stay linked instead of living in separate systems with version conflicts.
In real engineering work, this reduces duplicated data, makes handoff cleaner, and supports traceability across the full development process.
Core Functional Modules of Simcenter System Architect
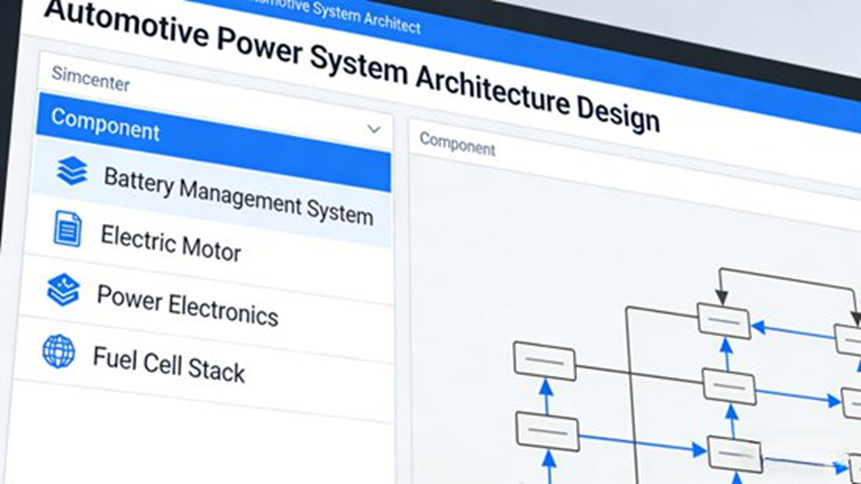
System Architecture Design Module
This is the heart of SSA. It gives teams a graphical and modular environment for building system architecture models.
Functional Architecture Modeling
The first modeling mode focuses on what the system does. In automotive work, this means building a functional view of the vehicle or subsystem.
For example, a vehicle control system can be broken into:
- sensing functions,
- decision functions, and
- execution functions.
The report uses this structure to explain how logic flows through the system. Sensing modules pass environmental data to decision modules. Decision modules process that data and send control commands to execution modules.
This type of modeling is useful in the concept stage because it helps teams define the system boundary and logic before final hardware choices are made.
Physical Architecture Modeling
The second modeling mode focuses on what the system is made of. This is where functions are assigned to physical components such as:
- cameras,
- radar units,
- domain controllers,
- brake calipers,
- motors, and
- battery components.
The report also notes that physical architecture modeling defines component interfaces, including:
- electrical interfaces,
- mechanical interfaces, and
- communication interfaces.
This matters in detailed engineering because it connects functions to real design choices and later integration work.
Hierarchical Architecture Design
SSA supports layered architecture design. Teams can work from:
- vehicle level,
- to subsystem level,
- to component level.
The report gives a clear example of this logic:
vehicle architecture → power subsystem architecture → battery component architecture
That kind of hierarchy keeps the model readable and helps large teams split work in a controlled way.
Reusable Automotive Component Libraries
The report also mentions built-in or reusable automotive libraries, including standard blocks for:
- powertrain,
- chassis,
- suspension, and
- control units.
This reduces repetitive modeling work and gives teams a more standard starting point.
Requirements Management and Traceability Module
This module is built around one idea: requirements should not sit outside the engineering flow.
Requirement Import
According to the report, SSA can import requirements from sources such as:
- Excel, and
- DOORS-style requirement documents.
That makes it easier to bring top-level program targets into the architecture and simulation environment.
Requirement Breakdown
The report gives a detailed example here. A vehicle-level target such as:
NEDC range ≥ 600 km
can be broken down into subsystem and component requirements such as:
- battery capacity ≥ 80 kWh,
- motor maximum power ≥ 150 kW, and
- single-cell energy density ≥ 280 Wh/kg.
This is a very practical step because it turns broad product goals into values that engineers can design and verify against.
Requirement Allocation
After breakdown, those requirements are assigned to the right architecture blocks. A battery capacity target goes to the battery system. A power target goes to the motor and drive system. A timing target goes to sensing, compute, and actuation blocks.
Forward and Reverse Traceability
The report makes a strong point here. SSA supports:
- forward traceability from requirement to design to simulation to validation, and
- reverse traceability from a failed result back to the original requirement.
If a vehicle misses its range target, engineers can trace the issue back to battery size, motor efficiency, thermal strategy, or control logic rather than guessing.
That saves time and keeps iteration focused.
Multidisciplinary Co-Simulation Module
This module turns architecture into a working system model.
Model Import and Compatibility
The report lists the main tool environments relevant here:
- Simcenter Amesim for mechanical and thermal models,
- MATLAB/Simulink for control strategy models, and
- Modelica for multiphysics models.
These can be integrated through standard interfaces like FMI/FMU so the team does not need to rebuild every model from scratch.
For automotive teams, that means different groups can keep their preferred modeling tools while still contributing to one system-level simulation setup.
Simulation Scenario Setup
The report gives several realistic automotive scenario types, including:
- NEDC cycle,
- WLTP cycle,
- hill-climb conditions, and
- braking conditions.
Scenario settings can include:
- vehicle speed,
- ambient temperature, and
- load conditions.
This part matters because a system model only becomes useful when it is tested under realistic operating conditions. A battery thermal model in a lab case is one thing. A battery thermal model under fast charging or high-speed driving is another.
Result Analysis
The report states that SSA supports result visualization through:
- curves,
- charts, and
- animations.
It also allows direct comparison of different architecture options. Engineers can check values such as:
- battery voltage,
- motor speed,
- suspension displacement, and
- thermal performance.
This makes it easier to spot bottlenecks and compare architecture choices in a structured way.
Optimization and Analysis Module
This module handles design improvement and architecture tradeoffs.
Parametric Optimization
The report says SSA can optimize parameters such as:
- battery capacity,
- motor power,
- suspension stiffness, and
- control strategy values.
Optimization goals may include:
- maximum range,
- minimum energy use, or
- better NVH performance.
The report notes the use of methods such as genetic algorithms and gradient-based optimization.
One result mentioned in the source text is that Hyundai, with AI support in the broader process, reduced single requirement evaluation time from 2 minutes to 0.1 seconds. That shows how system-level automation can cut design iteration time.
Multi-Objective Optimization
This is very important in automotive work because design goals often conflict. The report gives examples such as:
- range versus acceleration, and
- lightweighting versus structural strength.
SSA supports multi-objective optimization with weighted goals so teams can search for an architecture that balances competing needs rather than chasing only one KPI.
Sensitivity Analysis
Sensitivity analysis helps identify which parameters matter most. The report gives examples such as:
- battery capacity,
- motor efficiency, and
- drag coefficient
in relation to vehicle range.
That helps teams focus engineering effort where it will have the biggest effect.
Reporting and Collaboration Management Module
This module deals with engineering communication, governance, and lifecycle control.
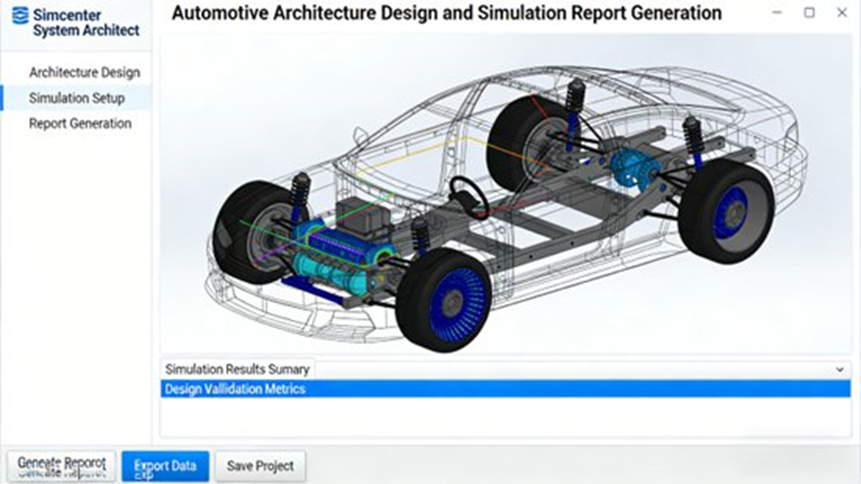
Automated Report Generation
The report states that SSA can generate:
- architecture design reports,
- simulation validation reports, and
- requirements traceability reports.
These reports can include architecture diagrams, simulation results, and requirement lists. That is useful not just for internal review, but also for standards-based engineering documentation.
Collaboration and Permissions
The report says SSA supports multi-user work and role-based permissions, including roles such as:
- designers,
- reviewers, and
- administrators.
This is important in large vehicle programs because architecture work, simulation work, and requirement management often belong to different teams.
PLM and Lifecycle Linkage
The report also notes integration with PLM tools so reports, architecture models, and simulation data can be tied to lifecycle workflows. That helps with:
- version control,
- record keeping, and
- later traceability.
The source text mentions AZL using this kind of connected workflow in EV NVH work so test data and simulation data could be brought together into a standard report set.
Engineering Use Case 1: Electric Vehicle Powertrain Architecture Design and Performance Optimization
The first case in the report centers on a mainstream vehicle maker developing a new battery electric vehicle. The program faced several common problems:
- difficulty choosing the best powertrain architecture,
- complicated cross-domain performance validation, and
- the need to balance range and energy use.
SSA was used as the main system-level tool.
Step 1: Import and Break Down Vehicle-Level Targets
The source report lists the main targets as:
- NEDC range ≥ 650 km,
- 0–100 km/h acceleration ≤ 6.5 seconds, and
- energy consumption ≤ 12 kWh per 100 km.
These top-level targets were imported into SSA and broken down into subsystem and component targets such as:
- battery capacity ≥ 85 kWh,
- motor maximum power ≥ 160 kW, and
- electric control efficiency ≥ 95%.
This created the link between vehicle goals and engineering architecture.
Step 2: Build Functional and Physical Architectures
The team then built both functional and physical powertrain architectures in SSA. Using automotive component libraries, they defined a physical chain made up of:
- battery pack,
- motor,
- electric control system, and
- reducer.
Three architecture options were compared:
- single-motor rear-wheel drive,
- dual-motor all-wheel drive, and
- single-motor front drive plus range extender.
This stage gave the team a structured way to compare concepts instead of relying on static presentations.
Step 3: Run Multidisciplinary Co-Simulation
The report states that the team imported:
- a battery thermal management model built in Simcenter Amesim, and
- a motor control strategy model built in MATLAB/Simulink.
They then configured NEDC, high-speed, and hill-climb conditions to simulate all three architecture concepts. Key outputs included:
- driving range,
- acceleration,
- energy use, and
- battery temperature.
This is one of the clearest examples in the report of SSA’s value in real vehicle development.
Step 4: Optimize and Select the Best Architecture
The report says the team used multi-objective optimization with goals such as:
- maximum range,
- minimum energy use, and
- best acceleration performance.
After optimization, the selected solution was the dual-motor all-wheel-drive architecture. The report gives the final results as:
- 680 km range,
- 0–100 km/h in 5.8 seconds, and
- 11.2 kWh per 100 km.
Those results met the vehicle targets.
Step 5: Trace Requirements and Generate Reports
The team then used SSA traceability functions to confirm that component design matched the original requirements. They generated:
- powertrain architecture reports, and
- simulation validation reports,
then sent the outputs into the PLM system for downstream work such as component selection and prototype preparation.
The report says this helped shorten the powertrain architecture development cycle by 30% and increased simulation validation efficiency by 40%.
Engineering Use Case 2: Autonomous Driving Domain Controller Architecture Design and Functional Safety Validation
The second case in the report focuses on an L2+ automated driving domain controller. The main challenges were:
- complex functional logic,
- difficult multi-module coordination, and
- functional safety validation under ISO 26262 ASIL-B expectations.
SSA was used to support both architecture work and safety-oriented simulation.
Step 1: Define and Allocate Functional Requirements
The report lists features such as:
- AEB,
- ACC, and
- lane keeping.
These were broken down into requirements for:
- perception,
- decision,
- execution, and
- communication modules.
At the same time, the team defined safety goals and risk levels in line with ISO 26262-style thinking.
Step 2: Build the Controller Architecture and Define Interfaces
The architecture brought together:
- camera and radar interfaces in the sensing layer,
- CPU/GPU resource allocation in the decision layer,
- brake and steering interfaces in the execution layer, and
- CAN, LIN, and Ethernet interfaces in the communication layer.
The report makes clear that interface definition is a major part of the architecture process, not a minor detail. In controller work, many problems come from timing, communication, and interface assumptions rather than algorithm intent alone.
Step 3: Simulate Fault Cases for Functional Safety Validation
The report says SSA was used together with:
- MATLAB/Simulink control strategy models, and
- Simcenter Testlab test data.
The team built fault scenarios such as:
- camera failure,
- communication interruption, and
- actuator failure.
These simulations were used to check diagnostics and fault-tolerant response.
Step 4: Optimize the Architecture
Based on the simulation results, the team found safety concerns such as:
- high communication delay, and
- slow fault diagnosis response time.
They then used SSA parameter optimization to adjust:
- communication protocol setup,
- compute allocation, and
- diagnostic strategy.
This helped improve safety and reliability before later integration stages.
Step 5: Generate Compliance-Oriented Outputs
The final outputs included:
- controller architecture design reports,
- functional safety validation reports, and
- traceability records.
These supported later certification and production readiness work.
The report says this case shows how SSA can support domain-controller development in a structured and standards-aware way, not just physical system modeling.
Chinese Version Adaptation and Local Engineering Value
The report includes a dedicated section on the Chinese version of Simcenter System Architect, and that part should stay in the article because it adds real value for the intended audience.
The Chinese version keeps the full core capability of the English version while adding local-language support such as:
- full Chinese interface text,
- Chinese menus and help documents,
- support for Chinese requirement document import and editing, and
- Chinese technical support and training.
The report also notes support for local standards and norms, including references such as GB/T 28950-2012 Electric Vehicle Safety Requirements.
This is useful for several reasons.
First, it lowers the learning barrier for engineering teams in China.
Second, it makes requirement work and daily collaboration easier in local projects.
Third, it still keeps data fully compatible with the English version, which supports cross-border collaboration between China-based and overseas teams.
That means a China team can use the Chinese version while a global partner uses the English version without breaking the shared engineering data flow.
Engineering Notes for Real-World Implementation
The report also gives practical guidance on using SSA in engineering projects. These details should not be skipped because they answer the question every real team asks after reading about a platform: what should we watch out for?
Model Standardization
In multi-domain co-simulation, imported models need consistent standards. The report says teams should make sure that models follow FMI/FMU expectations where needed and that units, interface parameters, and data definitions are consistent.
It also recommends building an internal standard model library so teams can reuse models with less risk of mismatch.
Requirement Quality
The source text warns against vague requirements such as “improve range.” A requirement should be:
- measurable,
- testable, and
- tied to a verification method.
Without that discipline, traceability becomes weak and the architecture model loses value.
Reasonable Simulation Scenarios
The report says simulation scenarios should match real operating conditions. Parameters such as:
- ambient temperature,
- road condition, and
- load
should reflect actual vehicle use cases.
A specific example in the report is a northern China EV program that should include low-temperature conditions at -20°C to verify battery and thermal management reliability.
Team Collaboration Management
Large automotive programs involve many groups. The report recommends clear user permissions, clear team responsibilities, and a defined collaboration flow across:
- architecture design teams,
- simulation teams, and
- requirements management teams.
Without this, version conflicts and duplicated work can return even if the tool itself is strong.
Deep Toolchain Integration
The final implementation note is to make full use of SSA’s integration with Simcenter tools and PLM systems. The report gives Teamcenter as a key example. Simulation results should not sit apart from design and requirement records. They should be linked so later review and reuse become easier.
Why Simcenter System Architect Matters Going Forward
The report closes with a future-looking section, and it is worth keeping because it frames the long-term reason this tool matters.
Vehicle systems will continue to become more complex as electrification, connectivity, intelligence, and software-defined architecture move forward. That will increase the need for:
- better system-level modeling,
- faster cross-domain simulation,
- stronger requirement control, and
- more reliable safety and performance validation.
The report also points to the future combination of SSA with:
- AI, and
- digital twin methods.
That direction makes sense. As models grow larger and programs move faster, engineering teams will need more automation in architecture studies, optimization, and system-level decision support.
The report’s final point is that MBSE is becoming a core method in automotive development, not a side practice. In that setting, SSA becomes more than a simulation connector. It becomes a central working layer in the full development flow.
Frequently Asked Questions
What is Simcenter System Architect and how does it fit into the automotive MBSE toolchain?
Short answer:
It is the system architecture layer that connects requirements, system design, simulation assets, and validation in an automotive MBSE workflow.
Simcenter System Architect is a system-level architecture modeling and co-simulation platform in the Siemens Simcenter portfolio. In automotive development, it usually sits between requirement definition and detailed engineering simulation. It links requirements, functional architecture, physical architecture, multi-domain models, and system validation so teams can study architecture options before hardware prototypes are available.
How does Simcenter System Architect support multidisciplinary co-simulation?
Short answer:
It lets models from different engineering tools run together in one system-level setup.
SSA supports heterogeneous model integration across different domains and tools. In the report, that includes Simcenter Amesim, MATLAB/Simulink, and Modelica-based models, with interoperability through interfaces such as FMI/FMU. This allows automotive teams to simulate interactions between mechanics, electronics, controls, thermal behavior, and other domains in one environment rather than checking them one by one.
Why is MBSE important for modern automotive system development?
Short answer:
Because modern vehicles are too complex to manage well with disconnected documents and isolated subsystem tools.
Vehicles now combine mechanical, electrical, electronic, and software systems in one tightly linked product. MBSE gives teams a structured way to define, break down, allocate, and verify requirements through formal models. In the workflow described by the report, SSA acts as the system-level platform that ties architecture and simulation together so teams can validate choices earlier and cut late-stage problems.
How does Simcenter System Architect integrate with other engineering tools?
Short answer:
It connects system architecture work with design, simulation, testing, and lifecycle tools.
The report lists integration with Simcenter Amesim, NX, Simcenter 3D, Simcenter Testlab, Teamcenter, and Git-style or file-based model management. This helps keep requirements, models, reports, and validation data connected across the engineering lifecycle. Instead of storing architecture, simulation, and lifecycle records in separate systems, teams can maintain a more consistent development thread.
What are the main automotive use cases for Simcenter System Architect?
Short answer:
The strongest use cases are EV powertrain design, battery thermal studies, energy strategy work, ADAS and domain controller design, and functional safety-oriented validation.
The report gives two full cases. One covers electric vehicle powertrain architecture design and optimization, including battery thermal management and drive-cycle simulation. The other covers an L2+ automated driving domain controller, including feature allocation, interface definition, fault simulation, and safety validation. These cases show how SSA is used for early architecture decisions and later system verification.
Final Takeaway
Simcenter System Architect is useful in automotive engineering because it gives teams one place to connect requirements, architecture, simulation, optimization, and verification.
From the source report, its value is clear in four areas:
- heterogeneous co-simulation,
- full traceability,
- modular architecture iteration, and
- toolchain integration.
Its five major function groups are also clear:
- system architecture design,
- requirements management and traceability,
- multidisciplinary co-simulation,
- optimization and analysis, and
- reporting and collaboration management.
The two engineering cases in the report show the same pattern from different angles. In EV development, SSA helps teams compare powertrain concepts and balance range, acceleration, energy use, and thermal behavior. In automated driving controller development, it helps organize features, interfaces, safety logic, fault cases, and compliance records.
The Chinese version adds practical value for local engineering teams without cutting off global collaboration.
Taken together, the report presents SSA as a real system-level development platform for modern vehicle programs, especially where complexity, traceability, and cross-domain integration are driving the workload.
Author Bio
Johnny Liu is the CEO at Dowway Vehicle. He works on automotive engineering strategy, system architecture planning, and digital development methods for EV, intelligent vehicle, and cross-domain engineering programs.
