


< Back to Electrical & Electronic Toolchain
Author: Johnny Liu, CEO at Dowway Vehicle
Last Updated: March 2026
- Introduction to NeuSAR SF Middleware
- The Evolution of Automotive E/E Architecture
- Core Features of NeuSAR SF Middleware
- NeuSAR SF Middleware and Cross-Domain Communication
- Key Components of NeuSAR SF Middleware
- Achieving Functional Safety with NeuSAR SF Middleware
- Engineering Applications of NeuSAR SF Middleware
- Performance, Scalability, and Reliability of NeuSAR SF Middleware
- Future Trends and Enhancements in NeuSAR SF Middleware
- Conclusion: The Impact of NeuSAR SF Middleware on Automotive Software Development
- 🔎 Top 5 Most Discussed FAQs (Last Month) — NeuSAR SF Middleware
- 1. What is NeuSAR SF Middleware and what problems does it solve?
- 2. How does NeuSAR SF support cross‑domain communication in vehicles?
- 3. What standards and platforms does NeuSAR SF Middleware adhere to?
- 4. How does NeuSAR SF enable easier development and debugging for automotive software?
- 5. Does NeuSAR SF support integration with cloud services and AI applications?
Introduction to NeuSAR SF Middleware
The world of automotive software is rapidly changing, especially with the rise of software-defined vehicles (SDVs). As vehicles transition from traditional distributed ECUs to centralized computing systems and domain controllers, managing the complexity of these systems becomes increasingly challenging.
NeuSAR SF Middleware is a key solution that helps bridge this gap. Designed to simplify the communication between different vehicle domains and improve software development efficiency, NeuSAR SF provides a unified framework for cross-domain collaboration, real-time data transfer, and ensuring functional safety.
This article dives into the essential components of NeuSAR SF Middleware, how it addresses challenges in E/E architecture, and the impact it has on the future of automotive software development.
The Evolution of Automotive E/E Architecture
Historically, automotive E/E systems relied on distributed electronic control units (ECUs) that were each responsible for a specific vehicle function. However, as the industry moves towards software-defined vehicles (SDVs), the shift towards centralized computing units and domain controllers becomes inevitable.
NeuSAR SF Middleware plays a significant role in this transition by simplifying communication between various vehicle systems. It helps solve challenges like cross-domain collaboration, software reusability, and high development complexity by abstracting hardware and communication protocol differences.
Core Features of NeuSAR SF Middleware
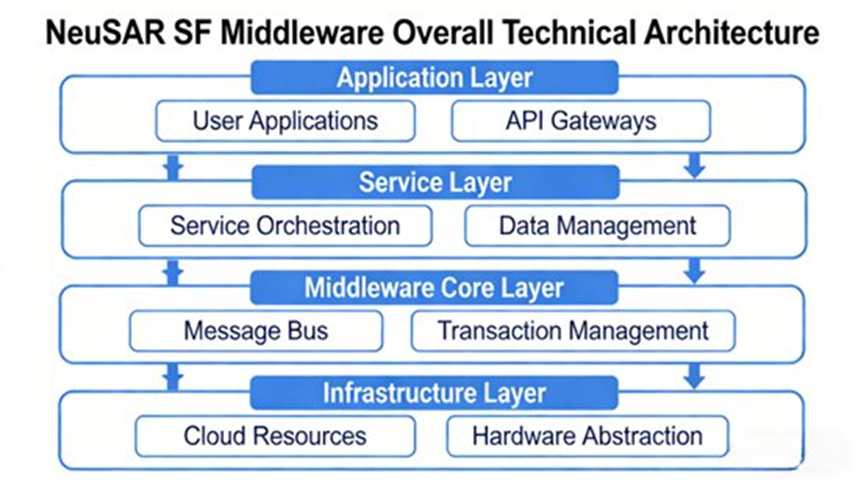
NeuSAR SF Middleware is structured with a three-layer architecture designed for flexibility, scalability, and efficient software development:
1. Bottom-layer Adaptation
The bottom layer of NeuSAR SF is responsible for abstracting hardware differences, operating systems, and communication protocols. This ensures compatibility across diverse vehicle systems, from ECUs to sensors, regardless of their underlying architecture.
2. Core Services Layer
This layer includes critical components like Vehicle Message Bus (VMB), Vehicle Basic Service (VBS), and Vehicle State Table (VST). These services handle the communication between different vehicle domains, manage data synchronization, and maintain system health, ensuring smooth and efficient vehicle operation.
3. Application Services Layer
The top layer offers high-level interfaces for developers to create applications for autonomous driving, infotainment, vehicle-to-cloud communication, and other advanced vehicle functions. This layer supports service orchestration and rapid prototyping.
NeuSAR SF Middleware and Cross-Domain Communication
As vehicles become more complex, cross-domain communication between different ECUs and systems is crucial. NeuSAR SF Middleware simplifies this with the Vehicle Message Bus (VMB), which enables seamless communication across domains regardless of the hardware, operating systems, or protocols used.
Vehicle Message Bus (VMB)
The VMB abstracts the complexity of communication and enables real-time data transfer between domains, such as autonomous driving and vehicle control. It allows developers to focus on application logic rather than the underlying communication protocols, making it a cornerstone for efficient cross-domain collaboration in automotive systems.
Key Components of NeuSAR SF Middleware
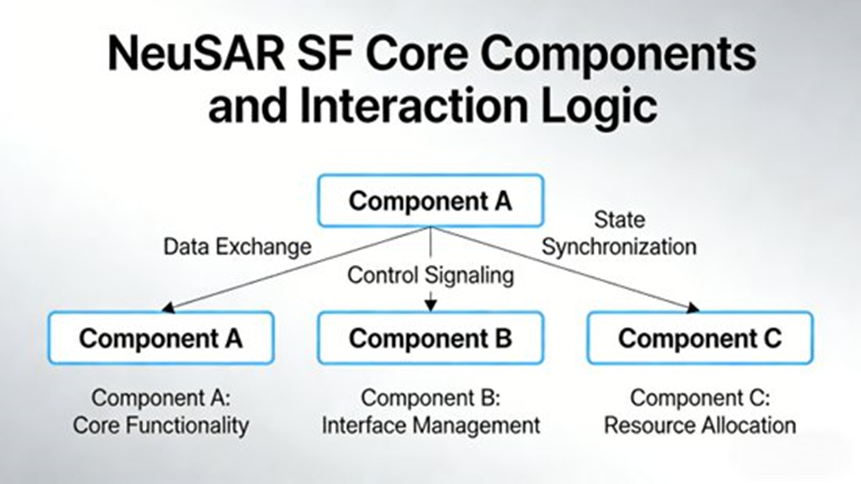
NeuSAR SF Middleware includes several key components that support effective communication, data management, and real-time decision-making:
Vehicle Basic Service (VBS)
The VBS provides essential services like system health monitoring, time synchronization, and resource management across the multi-core architecture of the vehicle. It ensures that systems like braking control and infotainment can work harmoniously while meeting real-time requirements.
Vehicle State Table (VST)
The VST is a data management service that simplifies development by abstracting data storage, caching, and synchronization tasks. Developers can focus on creating application logic while the VST handles data management efficiently.
Achieving Functional Safety with NeuSAR SF Middleware
One of the most critical concerns in modern automotive software is functional safety. As vehicles adopt more advanced technologies like autonomous driving, ensuring the reliability of safety-critical systems is crucial.
NeuSAR SF Middleware adheres to ISO 26262 safety standards, ensuring that safety-critical systems like braking and steering are reliable and function correctly even under failure conditions. The middleware includes fault detection, redundancy, and error recovery mechanisms that ensure safety in all driving conditions.
Engineering Applications of NeuSAR SF Middleware
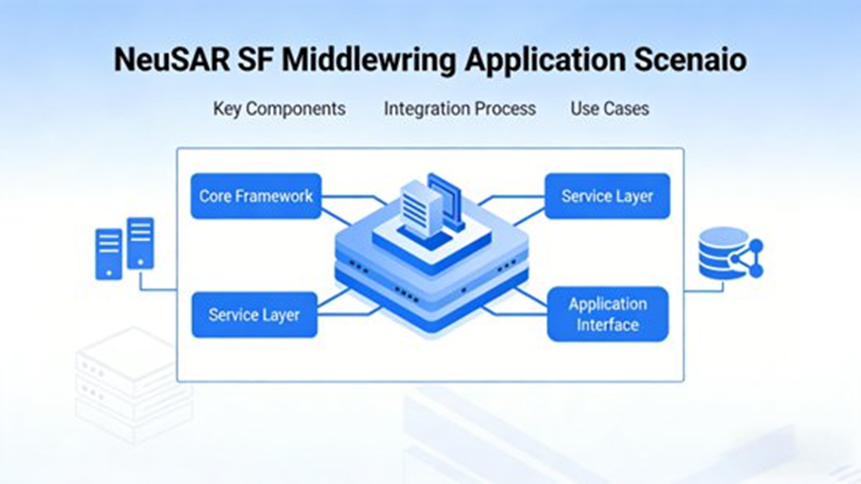
NeuSAR SF Middleware is already being applied in various real-world automotive scenarios, proving its reliability and scalability:
Central Domain Controllers
In a central domain controller setup, NeuSAR SF reduces hardware complexity by integrating multiple ECUs into a single system. This leads to lower hardware costs and better software reuse, resulting in faster software development cycles.
Autonomous Driving Systems
For autonomous driving, NeuSAR SF ensures that real-time sensor data from systems like lidar, radar, and cameras can be seamlessly integrated with vehicle control systems. This enables safer and more reliable decision-making in autonomous vehicles.
Performance, Scalability, and Reliability of NeuSAR SF Middleware
Scalability
As vehicles become more connected and autonomous, the complexity of automotive software increases. NeuSAR SF is designed to scale, adapting to new sensors, computing units, and systems as they are integrated into vehicles. This ensures that NeuSAR SF remains relevant as automotive systems evolve.
Reliability
NeuSAR SF Middleware includes built-in redundancy and fault tolerance to ensure that even in the case of hardware failure, critical systems can continue functioning. This is essential for safety-critical systems and ensures the overall reliability of the vehicle’s operations.
Future Trends and Enhancements in NeuSAR SF Middleware
As the automotive industry evolves, NeuSAR SF Middleware will continue to innovate. Future developments will focus on the integration of AI-driven technologies, cloud services, and vehicle-to-cloud (V2C) communication.
AI Integration
NeuSAR SF will integrate with AI and machine learning systems to enhance real-time decision-making, enabling autonomous systems to adapt to dynamic driving environments.
Conclusion: The Impact of NeuSAR SF Middleware on Automotive Software Development
NeuSAR SF Middleware is a transformative technology for automotive software development. It enhances cross-domain communication, ensures functional safety, and simplifies development and debugging, making it a cornerstone for the future of software-defined vehicles (SDVs).
As the automotive industry moves towards fully centralized, software-defined vehicles, NeuSAR SF will continue to support this transformation, offering the flexibility and reliability necessary to build the next generation of connected, autonomous vehicles.
🔎 Top 5 Most Discussed FAQs (Last Month) — NeuSAR SF Middleware
1. What is NeuSAR SF Middleware and what problems does it solve?
NeuSAR SF Middleware (Service Framework) is designed to address cross-domain collaboration, low software reuse, and high development complexity in software-defined vehicles (SDVs). It provides a unified communication framework and abstracts hardware/OS differences.
2. How does NeuSAR SF support cross‑domain communication in vehicles?
NeuSAR SF’s Vehicle Message Bus (VMB) provides a unified communication interface that abstracts differences in protocols, operating systems, and hardware, allowing seamless communication across vehicle domains.
3. What standards and platforms does NeuSAR SF Middleware adhere to?
NeuSAR SF is built on AUTOSAR standards and compatible with AUTOSEMO ASF, extending these standards to enable full vehicle-level service orchestration.
4. How does NeuSAR SF enable easier development and debugging for automotive software?
NeuSAR SF simplifies development with high-level tools like Python and Webservice APIs, enabling quick access to vehicle data and easy service configuration.
5. Does NeuSAR SF support integration with cloud services and AI applications?
Yes. NeuSAR SF supports cloud integration and AI applications, providing secure and consistent interactions between in-vehicle systems and cloud-based services.
