

- Quick Answer
- Why SBW Software Changes Everything
- Hardware Components
- What the Software Handles
- Hardware Abstraction Layer (HAL)
- Basic Software Layer (BSW)
- Functional Software Layer
- Application Layer
- Steering Intent Recognition
- Variable Steering Ratio (MPC)
- Steering Torque Control (Adaptive PID)
- Active Return-to-Center Control
- Short Answer
- Detailed Design
- Short Answer
- Design
- Switching Requirement
- Real Challenge
- Solution
- Short Answer
- Workflow
- Testing Levels
- Result
- Steering Delay
- Redundancy Switching
- Electromagnetic Interference (EV)
- Calibration
- Measured Results
- How can SBW systems meet ASIL-D safety without mechanical backup?
- What are the biggest challenges in SBW algorithms?
- How is steering feel simulated?
- How does SBW work with autonomous driving?
- What limits SBW mass production?
Quick Answer
Steer-by-wire software architecture replaces the mechanical steering column with a fully electronic system. It uses AUTOSAR-based layered software, real-time control algorithms like MPC and adaptive PID, and ASIL-D safety mechanisms to control steering through sensors, ECUs, and electric actuators while maintaining reliability through redundancy and fault-tolerant design.
- No mechanical linkage — steering is fully software-controlled
- AUTOSAR layers structure the system (HAL → BSW → Functional → Application)
- Core control: MPC, adaptive PID, feedforward
- ASIL-D safety achieved through redundancy and fault-tolerant control
- Developed using MBD with MIL, HIL, and real vehicle testing
- Essential for L2+ ADAS and autonomous driving
Why SBW Software Changes Everything
I’ve worked on programs where removing a single mechanical shaft forced us to rethink the entire system.
Once that shaft is gone, there’s no fallback.
Everything—control, safety, driver feel—depends on software.
That’s where SBW becomes a different kind of engineering problem.
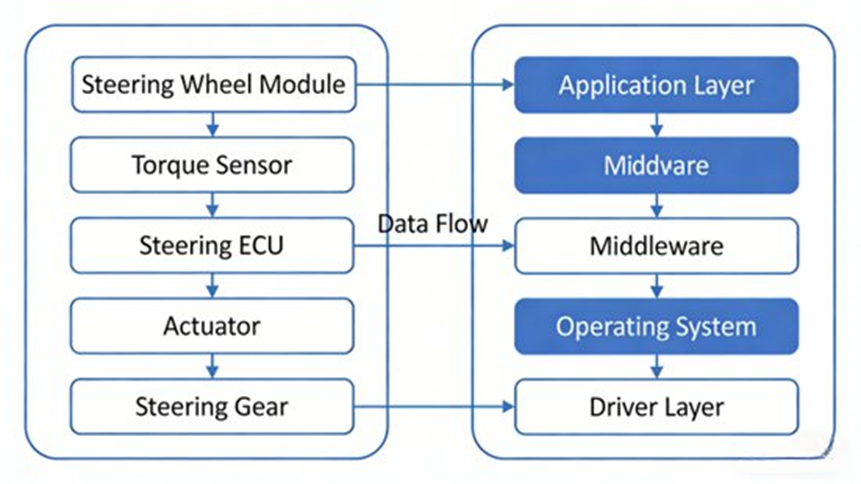
What Is Steer-by-Wire Software Architecture and How Does It Work?
Steer-by-wire software converts driver input into electrical signals and controls steering through software, without any physical linkage.
Signal Flow
- Steering wheel sensors measure torque and angle
- Signals go to the Steering Control Unit (SCU)
- Software calculates steering command
- Actuator motor executes movement
- Feedback motor recreates steering feel
What Makes It Different
| Feature | Traditional Steering | SBW |
| Connection | Mechanical | Electronic |
| Control | Fixed | Software-defined |
| Steering ratio | Static | Dynamic |
| Integration | Limited | Full system integration |
The key shift is simple:
👉 Steering becomes a control system problem, not a mechanical one.
What Does a Complete SBW System Include?
Hardware Components
- Steering wheel module
- Torque sensor (±0.05 Nm)
- Angle sensor (0.01° resolution)
- Feedback motor
- Steering Control Unit
- Infineon AURIX TC4x / NXP S32G399
- Steering actuator
- 12 kW PMSM motor
- Gear reducer and rack
- Rack position sensor (±150 mm)
- Communication
- CAN FD (500 kbps)
- Ethernet (1000BASE-T1, 1 Gbps)
- Power system
- 12V / 48V redundant supply
What the Software Handles
- Input signal processing
- Control decisions
- Motor control
- Feedback generation
- Fault detection and recovery
No software → no steering.
How Is SBW Software Built Using AUTOSAR?
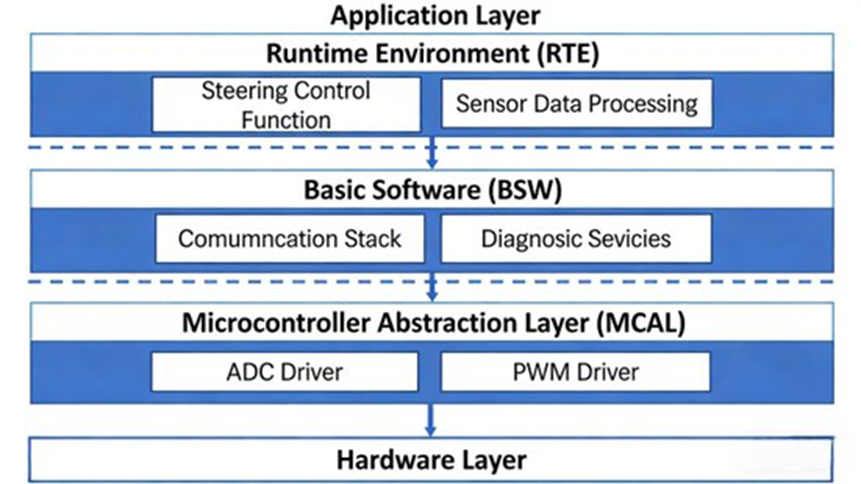
SBW software follows a four-layer AUTOSAR Classic Platform structure.
Hardware Abstraction Layer (HAL)
This layer hides hardware details.
Includes:
- Sensor drivers (torque, angle, rack)
- Motor drivers using FOC (≤10 ms response)
- Communication drivers
Supports sensor redundancy switching.
Basic Software Layer (BSW)
This is where system services run.
Includes:
- RTOS (QNX 7.1)
- 5 ms control cycle
- 20 ms background tasks
- Communication stack
- AUTOSAR COM
- ISO 14229 diagnostics
- Safety monitoring
- Watchdog
- CRC and parity checks
- Task supervision
- Memory
- Flash with encryption
- Power management
- Redundant switching
Functional Software Layer
This is the control core.
- Steering control algorithms
- Fault detection
- Redundancy logic
- Cross-domain coordination
Application Layer
Handles user-level behavior.
- Driving modes (sport, comfort, eco, autonomous)
- Road condition adaptation
- OTA updates with rollback support
What Control Algorithms Are Used in SBW?
Steering Intent Recognition
Short answer:
It identifies what the driver or system wants to do.
Details:
- Inputs: torque, angle, speed
- Uses fuzzy control
- Switches between manual and autonomous (<50 ms)
Variable Steering Ratio (MPC)
Short answer:
MPC adjusts steering behavior based on speed and vehicle dynamics.
Details:
- Based on 2-DOF vehicle model
- Low speed: 12:1–16:1
- High speed: 8:1–10:1
- Uses suspension data (height, stiffness)
Steering Torque Control (Adaptive PID)
Short answer:
PID ensures precise and stable torque output.
Details:
- Accuracy ≤0.1°
- Compensates for friction and road resistance
- Adjusts to driving style using learning-based tuning
Active Return-to-Center Control
Short answer:
Keeps the steering wheel returning smoothly to center.
Details:
- Feedforward + feedback
- Accuracy ≤0.5°
- Adjusted for slope and lateral forces
How Does SBW Meet ISO 26262 ASIL-D Safety?
Short Answer
Through redundancy, real-time monitoring, and fault-tolerant control that keeps the system working even during failures.
Detailed Design
Hazard Analysis
- FMEA
- FTA
- 30+ failure modes identified
Safety Mechanisms
- Watchdog monitoring
- Data integrity checks
- Task supervision
Fault Response
| Fault Type | Action |
| Minor | Compensation |
| Major | Switch to backup |
| Critical | Emergency steering |
Emergency Strategy
- Differential torque control
- Controlled stop
Key point:
👉 The system assumes failures will happen—and keeps working anyway.
What Is Redundancy in SBW Systems?
Short Answer
Multiple independent systems ensure steering continues even if one fails.
Design
- Dual sensors
- Dual ECU
- Dual communication
- Dual control paths
Switching Requirement
- ≤20 ms failover
- No noticeable disturbance
Real Challenge
- Torque jumps
- Parameter mismatch
Solution
- State synchronization
- Smooth transition control
How Is SBW Software Developed?
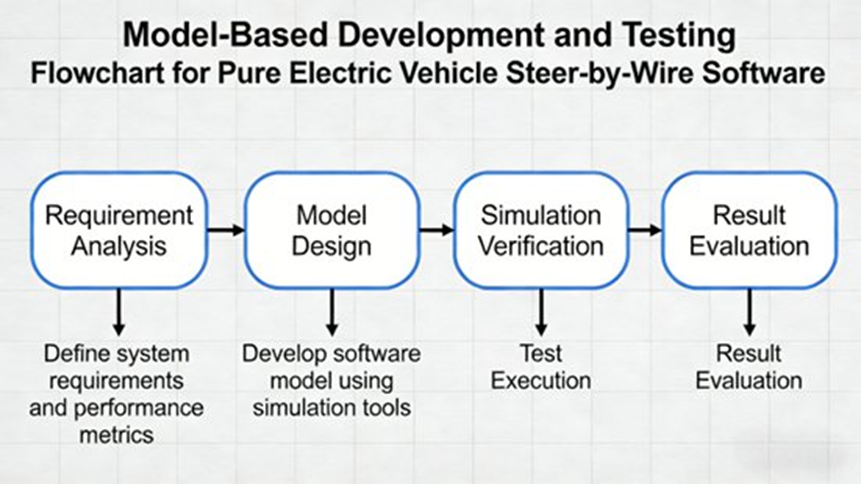
Short Answer
Using Model-Based Design (MBD) with simulation and automatic code generation.
Workflow
- Build system models
- Simulate algorithms
- Generate code
- Deploy to SCU
Testing Levels
- MIL
- HIL
- Vehicle testing
Result
- 40% faster development
- Lower integration risk
What Are the Hardest Engineering Problems?
Steering Delay
Cause:
- Signal + computation + motor delay
Fix:
- Faster algorithms
- FOC optimization
- Feedforward control
Result:
- <20 ms latency
Redundancy Switching
Fix:
- Parameter sync
- Smooth transition
Electromagnetic Interference (EV)
Fix:
- Kalman filtering
- EMC design
Calibration
Fix:
- Digital twin
- AI-based tuning
Measured Results
- Steering accuracy: ≤0.08°
- Response time: ≤8 ms
- Return error: ≤0.3°
How Does SBW Work with Other Systems?
Short answer:
It works together with braking, suspension, and autonomous systems.
Details:
- Brake-by-wire → stability
- Air suspension → roll control
- ADAS → path tracking
Example:
During a turn:
- Suspension detects roll
- SBW adjusts steering torque
What’s Next for SBW Software?
- AI-driven control
- Cross-domain systems
- High-performance computing (CPU + GPU + NPU)
- SOA architecture
- Standardization
🔥 FAQs (Updated for 2026)
How can SBW systems meet ASIL-D safety without mechanical backup?
Short answer:
By using redundancy and fault-tolerant control so the system keeps working during failures.
Details:
- Dual ECUs, sensors, power supply
- Real-time diagnostics
- Fail-operational design
- Backup control strategies
What are the biggest challenges in SBW algorithms?
Short answer:
Real-time limits and system uncertainty.
Details:
- MPC must run within ~5 ms
- Tire-road conditions are unpredictable
- Noise and actuator limits
- Fault-tolerant control integration
Solutions:
- Simplified models
- MPC + PID combination
- AI-based tuning
How is steering feel simulated?
Short answer:
Using motors and control algorithms.
Details:
- Feedback motors generate torque
- Road condition estimation
- Speed-based adjustment
- Driver customization
How does SBW work with autonomous driving?
Short answer:
It acts as a core actuator for vehicle control.
Details:
- Receives path planning commands
- Works with braking and suspension
- Enables centralized control
What limits SBW mass production?
Short answer:
Safety, cost, and trust.
Details:
- ASIL-D certification
- System reliability
- Redundancy cost
- Lack of standards
- Driver trust
Author
Johnny Liu
CEO, Dowway Vehicle
Johnny Liu works on intelligent chassis systems, steer-by-wire architecture, and EV platforms. He has led SBW software projects from development to production, focusing on safety-critical systems, AUTOSAR architecture, and control algorithms.
