


< Back to Intelligent Chassis Software
Brake-by-Wire (BBW) software development is the engineering process of converting driver braking input into electronically controlled braking force using sensors, ECU software, and actuators, replacing traditional mechanical or hydraulic transmission while ensuring real-time performance and fail-operational safety.
- What Is Brake-by-Wire Software Development?
- What Is the Architecture of a Brake-by-Wire System?
- What Are the Key Software Requirements?
- How Is Brake-by-Wire Software Structured?
- How Does Brake Intent Recognition Work?
- How Is Braking Force Controlled?
- EHB Control
- EMB Control
- Simulation optimization
- How Is Brake Pedal Feel Simulated?
- Implementation
- Behavior tuning
- Optimization
- How Is Functional Safety Achieved?
- Fault diagnosis
- Redundancy
- Degradation strategy
- Safety process
- How Does Brake-by-Wire Work with ADAS?
- Use cases
- Communication
- What Is the Development Process?
- Steps
- How Is Brake-by-Wire Tested?
- Simulation
- HIL
- Vehicle testing
- What Are the Main Engineering Challenges?
- Solutions
- What Are the Future Trends?
- Trends
- 🔥 FAQs — Latest Trends in Brake-by-Wire Software (2026)
- Author
- Brake-by-Wire replaces mechanical braking with ECU control
- Core: control algorithms + embedded software + safety design
- Must meet ASIL-D safety requirements
- Response time ≤100 ms, accuracy ≤±5%
- Validated through simulation, HIL, and real vehicle testing
There’s a moment during a brake-by-wire project when things feel different.
You’re not working on brakes anymore.
You’re working on a system where software decides how fast a vehicle stops—and whether it can still stop when something fails.
That changes how everything is designed.
What Is Brake-by-Wire Software Development?
Brake-by-Wire software development means building embedded systems that translate pedal input into braking force using electronic control instead of mechanical linkage.
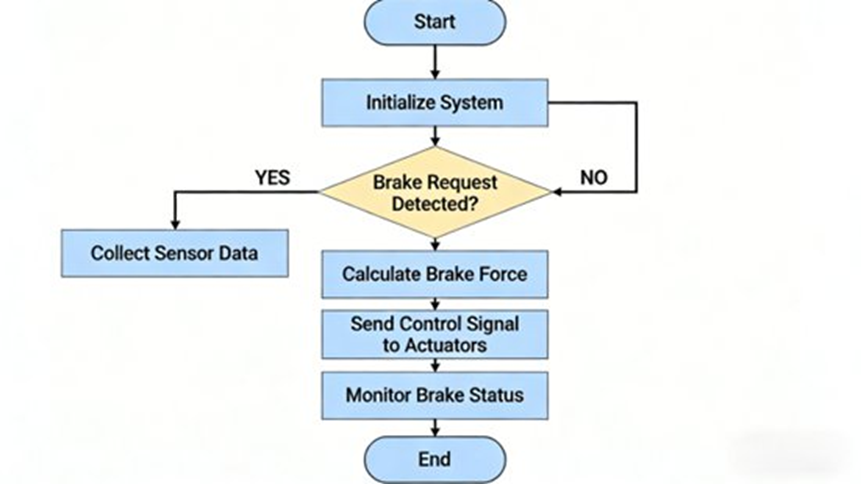
How it actually works
- Pedal sensors capture driver input
- ECU reads and processes signals
- Control algorithms calculate target braking force
- Actuators apply braking
Why software matters most
Software controls:
- Response speed
- Braking accuracy
- Driver feel
- Safety behavior under failure
In modern vehicles, braking performance depends more on code than on hardware.
What Is the Architecture of a Brake-by-Wire System?
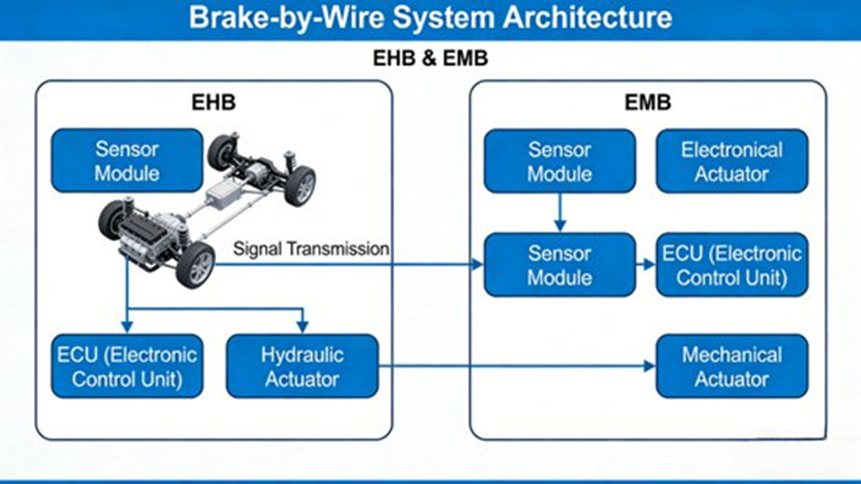
A Brake-by-Wire system is built with four layers: perception, control (ECU), actuation, and communication, forming a real-time closed-loop system.
Perception Layer
Inputs include:
- Pedal displacement
- Pedal pressure
- Wheel speed
- Longitudinal acceleration
- Hydraulic pressure (EHB)
- Motor current and position (EMB)
These signals must be accurate and fast. Any delay affects braking behavior.
Control Layer (ECU)
The ECU is the central software unit.
It handles:
- Signal processing
- Algorithm execution
- Fault detection
- Redundancy control
- Communication with ADAS and vehicle controllers
Actuation Layer
- EHB: motor + hydraulic system
- EMB: wheel-end motor
This is where commands turn into braking force.
Communication Layer
- CAN for control signals
- Ethernet for ADAS interaction
Timing here is critical. Small delays increase stopping distance.
What Are the Key Software Requirements?
Brake-by-Wire software must meet strict requirements for safety, performance, timing, compatibility, and reliability.
Functional Safety (ASIL-D)
- Must follow ISO 26262
- Must detect faults quickly
- Must keep braking available during failure
Control Performance
- Response ≤100 ms (EMB ≤80 ms)
- Accuracy ≤±5% (can reach ±3%)
- Smooth pedal feel
- Support ABS, EBD, TCS, ESC
Real-Time Performance
- Sampling ≤10 ms
- Control cycle ≤20 ms
- Output ≤50 ms
Compatibility
- Adapt to different vehicle platforms
- Use parameter-based configuration
- Support ADAS functions
Reliability
- Works under temperature and vibration
- MTBF ≥10,000 hours
- Includes fault detection and reporting
How Is Brake-by-Wire Software Structured?
Brake-by-Wire software uses a layered design: HAL, Basic Software, and Application layer, allowing reuse and easier integration.
HAL (Hardware Abstraction Layer)
- Connects to sensors and actuators
- Hides hardware differences
Basic Software (BSW)
Includes:
- RTOS (task scheduling)
- Communication stack
- Diagnostics (ISO 14229)
- Fault management
Application Layer
Core functions:
- Brake intent recognition
- Force control
- Pedal feel simulation
- Redundancy handling
- ADAS coordination
How Does Brake Intent Recognition Work?
Brake intent recognition determines whether the driver is lightly braking, normally braking, or performing emergency braking using pedal and vehicle data.
Short Answer
The system combines threshold logic and fuzzy logic using pedal displacement, speed, and pressure to classify braking intent and calculate target braking force.
How it works
- Extract pedal features
- Apply thresholds
- Refine with fuzzy logic
- Consider vehicle speed and road condition
Example
- High speed + fast pedal → emergency braking
- Low speed + small input → light braking
How Is Braking Force Controlled?
Brake-by-Wire uses closed-loop control to ensure actual braking force follows the target value despite disturbances.
Short Answer
The system compares target and actual force, then adjusts actuators using feedback control (PID or torque control) and feedforward compensation.
EHB Control
- Force → hydraulic pressure
- Pressure feedback
- PID control
- Feedforward adjustment
- Online parameter tuning
EMB Control
- Force → motor torque
- Torque loop + position loop
- Current feedback
- Temperature compensation
Simulation optimization
- MATLAB / Simulink
- CarSim
- AMESim
Tested across different road conditions.
How Is Brake Pedal Feel Simulated?
Brake pedal feel is recreated using a spring-damper model to mimic traditional braking feedback.
Short Answer
Software models pedal resistance and damping so drivers feel natural feedback even without mechanical linkage.
Implementation
- Spring → stiffness
- Damper → smoothness
Behavior tuning
- Normal → linear
- Emergency → stronger resistance
- Fault → noticeable change
Optimization
- Based on test data
- Machine learning tuning
How Is Functional Safety Achieved?
Brake-by-Wire ensures safety through fast fault detection, redundancy, and controlled system degradation.
Short Answer
The system detects faults, switches to backup components, and maintains minimum braking capability under failure conditions.
Fault diagnosis
- Sensors
- Actuators
- ECU
- Communication
Methods:
- Plausibility checks
- Periodic checks
- Redundant comparison
Redundancy
- Dual ECU or dual-core
- Dual sensors
- Backup actuation
Degradation strategy
| Fault Level | Action |
| Minor | Compensation |
| Severe | Switch system |
| Critical | Backup braking |
Safety process
- HARA
- FMEA
- Safety requirements
How Does Brake-by-Wire Work with ADAS?
Brake-by-Wire acts as the execution layer for ADAS by converting control commands into actual braking force and returning feedback.
Short Answer
ADAS sends braking commands, the ECU calculates force, actuators apply braking, and feedback is returned for closed-loop control.
Use cases
- AEB
- ACC
- Stability support
Communication
- CAN + Ethernet
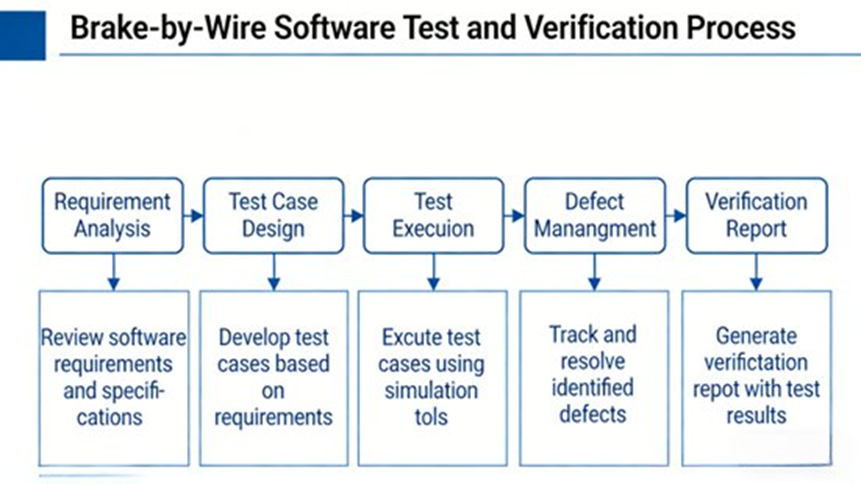
What Is the Development Process?
Brake-by-Wire software follows the V-model to ensure traceability and safety validation.
Short Answer
Development moves from requirements to design, coding, testing, and vehicle validation, with verification at each step.
Steps
- Requirements
- System design
- Software design
- Coding (MISRA C)
- Unit test
- Integration test
- System test
- Vehicle test
How Is Brake-by-Wire Tested?
Testing includes simulation, HIL, and vehicle validation to ensure performance and safety.
Short Answer
Simulation checks algorithms, HIL tests real hardware behavior, and vehicle testing validates real-world performance.
Simulation
- MATLAB / CarSim / AMESim
HIL
- ECU + simulated environment
- Fault testing
Vehicle testing
- Braking distance ≤35m at 100 km/h
- Extreme conditions
What Are the Main Engineering Challenges?
Brake-by-Wire faces challenges in control accuracy, safety compliance, system integration, and cost.
Short Answer
The main issues come from nonlinear systems, strict safety requirements, vehicle differences, and high development cost.
Solutions
- Adaptive control
- Signal filtering
- Parameterized design
- Simulation-first testing
What Are the Future Trends?
Brake-by-Wire is moving toward software-defined, fully electric, and more intelligent systems.
Short Answer
Future systems will rely more on AI, integrate with other vehicle systems, and move toward EMB and full by-wire architectures.
Trends
- AI-based control
- System integration
- Cybersecurity
- EMB deployment
🔥 FAQs — Latest Trends in Brake-by-Wire Software (2026)
How is Brake-by-Wire software evolving in Software-Defined Vehicles?
Short Answer:
Brake-by-Wire software is moving toward centralized architectures where control logic is separated from hardware, increasing reliance on software coordination and system-level validation.
Detailed:
Control is shifting from distributed ECUs to centralized systems, requiring stronger orchestration and fail-operational strategies.
Why is redundancy critical in Brake-by-Wire?
Short Answer:
Because mechanical backup is removed, systems must remain operational even during failures using redundant ECUs, sensors, and actuators.
Detailed:
Dual-channel designs and independent signal paths are used to guarantee braking capability.
What are the main software challenges in EMB?
Short Answer:
EMB requires precise motor control, thermal management, and synchronization across wheels without hydraulic backup.
Detailed:
This increases control complexity and safety requirements compared to EHB.
How does Brake-by-Wire integrate with ADAS?
Short Answer:
It receives commands from ADAS and executes braking while sending feedback for closed-loop control.
Detailed:
Supports AEB, ACC, and autonomous functions through real-time communication.
What development methods work best?
Short Answer:
A combination of model-based development, V-model lifecycle, and iterative updates.
Detailed:
Includes MIL, SIL, HIL testing and AUTOSAR-based architecture.
Author
Author: Johnny Liu
CEO, Dowway Vehicle
Experience: Automotive control systems and intelligent chassisLast Updated: March 24, 2026
