


< Back to Data Acquisition Toolchain
a full data acquisition system. That system connects sensors, networks, processing, and applications so teams can turn raw vehicle data into usable insights for testing, development, and automation.
- Why this matters in real projects
- What is an automotive data logger today?
- How the full data acquisition system works
- What data needs to be captured?
- What hardware is involved?
- What communication protocols are used?
- How data moves from vehicle to cloud
- What happens after collection?
- Why synchronization matters so much
- How systems handle harsh environments
- Data security in automotive systems
- Why scalability is critical
- Case Study: EV testing
- Case Study: Autonomous driving
- Software stack overview
- How to choose the right system
- Future direction
- Quick Answers
- Detailed FAQ
- A data logger is part of a complete vehicle data system
- Modern vehicles generate huge volumes of data daily
- The real challenge is sync, reliability, and usability
- Systems must handle edge processing + cloud pipelines
- Essential for EV testing and autonomous driving
Why this matters in real projects
Let me be blunt.
Collecting data is easy.
Using it properly? That’s where things fall apart.
I’ve seen teams run weeks of road tests, only to realize later the timestamps didn’t match across sensors. That meant the data couldn’t be used for analysis or training.
That’s why this topic matters.
👉 The system matters more than the device.
What is an automotive data logger today?
At a basic level, it records signals from ECUs, sensors, and networks.
But in real-world setups, it works inside a larger system that includes:
- Sensors and signal conditioning
- Vehicle networks (CAN, Ethernet)
- Edge processing
- Cloud storage and analysis
👉 The role has shifted from “recording” to supporting decision-making.
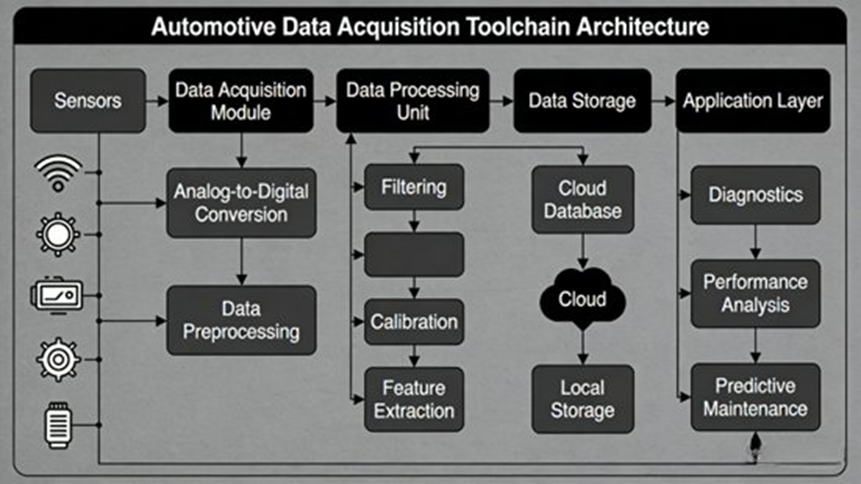
How the full data acquisition system works
The system follows a five-layer structure:
1. Data Source Layer
- Powertrain (engine, motor, battery)
- Chassis (brakes, suspension, steering)
- Intelligent systems (LiDAR, cameras, radar, V2X)
2. Acquisition Hardware
- Data logger
- Sensors and conditioning modules
- T-Box (connectivity)
3. Transmission Layer
- In-vehicle: CAN, CAN FD, Ethernet
- Remote: 4G, 5G, Wi-Fi, satellite
4. Data Processing
- Cleaning
- Conversion
- Fusion
- Feature extraction
5. Application Layer
- Development
- Testing
- Production quality
- Maintenance and OTA updates
👉 Everything is connected. Break one layer, and the value drops fast.
What data needs to be captured?
Powertrain and EV systems
- Engine speed, pressure, injection signals
- Motor torque and speed
- Battery voltage, current, SOC, temperature
- ECU commands and faults
Chassis and body
- Suspension movement
- Steering angle
- Brake pressure
- Tire pressure and temperature
- Vehicle attitude
Intelligent vehicle systems
- LiDAR point clouds
- Camera video
- Radar data
- GNSS positioning
- V2X communication
- Cabin interaction data
👉 Different data types mean different system demands:
- Precision
- Stability
- Bandwidth
What hardware is involved?
Data logger
- 8 to 128+ channels
- 1Hz to 1MHz sampling
- Up to 1TB storage
- -40°C to 85°C operation
- CAN, CAN FD, Ethernet support
Sensors and conditioning
- Temperature (±0.1°C)
- Pressure (±0.5% FS)
- Acceleration (±0.01g)
- Torque sensors
Conditioning handles:
- Amplification
- Filtering
- Noise reduction
- High-resolution conversion
T-Box
- 4G / 5G connectivity
- GNSS positioning
- Low power mode
- Data recovery after interruption
What communication protocols are used?
- CAN: standard vehicle communication
- CAN FD: higher speed for EV systems
- Ethernet: high-bandwidth data like video
- LIN: simple control signals
- OBD-II: diagnostics
- DDS / SOME-IP: advanced systems
👉 Most vehicles run several protocols at once.
That means gateways are necessary.
How data moves from vehicle to cloud
Inside the vehicle
- Sensors → logger → network
Remote transmission
- 4G / 5G / Wi-Fi / satellite
5G enables:
- Low latency (~10 ms)
- High throughput
Offline handling
- Local storage
- Sync later
- Resume after interruption
Security
- TLS
- AES encryption
- Access control
What happens after collection?
Cleaning
- Remove noise
- Filter abnormal values
- Remove duplicates
Conversion
- Standardize units
- Normalize formats
Fusion
- Combine LiDAR, camera, radar
- Improve accuracy
Preprocessing
- Segment by driving conditions
- Extract key features
👉 None of this works without good timing.
Why synchronization matters so much
If timing is off:
- Sensors don’t match
- Analysis breaks
- AI models fail
Methods used
- GPS timing
- Hardware triggers
- PTP (IEEE 1588)
- Software correction
Targets
- ≤1 ms (general use)
- ≤1 μs (autonomous driving)
👉 No sync, no usable data. Simple as that.
How systems handle harsh environments
Conditions
- -40°C to 85°C
- Heavy vibration
- Strong electromagnetic interference
Solutions
- Shielded enclosures
- Shielded cables
- Isolation circuits
- Filtering algorithms
- CRC validation
Installation tips
- Avoid high-interference zones
- Use vibration-resistant mounts
Data security in automotive systems
Types of data
- Vehicle performance
- User-related data
- Proprietary algorithms
Protection layers
- Secure devices
- Encrypted transmission
- Encrypted storage
- Access control
Data handling
- Backup systems
- Data masking
- Tiered storage
👉 This is no longer optional. It’s required.
Why scalability is critical
Modular design
- Add sensors easily
- Expand channels
- Upgrade components
Standard interfaces
- CAN FD
- Ethernet
- OBD-II
Edge + cloud
- Edge reduces load
- Cloud handles analysis
👉 If your system isn’t flexible, it won’t last.
Case Study: EV testing
- 64-channel logger
- 100Hz–1kHz sampling
- CAN FD
- 5G connectivity
Results:
- +8% battery performance
- +3% motor efficiency
- +40% testing efficiency
Case Study: Autonomous driving
- 128 channels
- 1MHz sampling
- Ethernet network
- Microsecond sync
- 5G upload
Stack:
- Edge processing
- Kafka + Flink
- Hadoop + Spark
Results:
- Better sync accuracy
- Faster data handling
- Improved training cycles
Software stack overview
- Edge: filtering, compression
- Streaming: Kafka, Flink
- Analysis: MATLAB, dashboards
How to choose the right system
Ask yourself:
- What signals are needed?
- How many channels?
- Required sampling rate?
- Which protocols?
- Real-time or offline?
- Environmental constraints?
- Security requirements?
Common mistakes
- Ignoring sync
- Underestimating bandwidth
- No edge processing
- Weak security
Future direction
- AI-assisted data processing
- Full lifecycle integration
- Smaller hardware
- Stronger security
🔥 FAQ (With Short Answers First)
Quick Answers
- Massive data → handled with edge filtering + cloud pipelines
- Sync → achieved with GPS + PTP + hardware triggers
- Transmission → limited by bandwidth and latency
- Scalability → requires modular design
- Data quality → depends on processing and labeling
Detailed FAQ
1. How can systems handle massive data volumes?
They use fast onboard storage, filter data at the edge, and rely on distributed cloud systems. Not all data is uploaded—only useful parts.
2. How is synchronization ensured?
Through GPS timing, PTP, and hardware triggers. High-precision systems need microsecond-level accuracy.
3. What are the main transmission challenges?
Bandwidth limits, latency, and data reliability. Solutions include buffering, compression, and 5G networks.
4. How do systems stay scalable?
By using modular hardware, standard protocols, and flexible software pipelines.
5. How is data quality ensured for AI?
Through cleaning, filtering, segmentation, and consistent labeling across datasets.
Author
Johnny Liu
CEO, Dowway Vehicle
Johnny Liu works closely with vehicle testing teams and autonomous driving projects, focusing on data acquisition systems, edge computing, and vehicle data platforms.
Last Updated: March 24, 2026
Final takeaway
Here’s the real takeaway:
A data logger alone won’t solve your problem.
