

< Back to Intelligent Chassis Software
Direct Answer
Intelligent chassis software controls braking, steering, and suspension through a central system called a chassis domain controller (DCU). It combines real-time algorithms, sensor data, and safety design to manage vehicle motion with high precision and reliability.
- Why Intelligent Chassis Software Matters
- What Is Intelligent Chassis Software?
- What Does a Chassis Domain Controller (DCU) Do?
- How Is Intelligent Chassis Software Built?
- What Control Algorithms Are Used?
- Why Sensor Fusion Is Needed
- How Safety and Security Are Handled
- How Development Works in Practice
- Real Project Results
- Main Challenges in Development
- How Compute Power Affects the System
- Future Direction
- Why is software-defined architecture important?
- What are the biggest challenges today?
- How is MPC changing chassis control?
- What role does AI play?
- How do OEMs reduce development time?
- Intelligent chassis = DCU + control algorithms + sensor fusion + safety system
- Architecture: HAL → BSW → functional → application
- MPC handles coordination across systems
- Development uses MBD, MIL, HIL, and vehicle testing
- Main challenges: timing, safety validation, calibration
Why Intelligent Chassis Software Matters
Short answer:
Vehicles now need to think before they move, not just react after.
Traditional chassis systems wait for driver input.
Modern systems read the road, predict motion, and adjust in milliseconds.
I’ve seen vehicles adjust suspension before hitting a bump just from camera and map input. That’s the shift.
The chassis is no longer just hardware.
It’s a control system running software.
What Is Intelligent Chassis Software?
Short answer:
It is software that controls brake-by-wire, steer-by-wire, and suspension in a coordinated way.
Key change
| Old approach | New approach |
| Mechanical control | Software control |
| Separate ECUs | Domain controller |
| Reactive | Predictive |
Real example
On a wet curve:
- Steering adjusts
- Suspension stiffens
- Braking redistributes
All done automatically.
What Does a Chassis Domain Controller (DCU) Do?
Short answer:
The DCU replaces multiple ECUs and runs unified control logic for the chassis.
What it handles
- Real-time control tasks
- Communication (CAN FD, Ethernet, FlexRay)
- Coordination across systems
- Safety monitoring
Typical chips
- NXP S32G
- Infineon AURIX TC4x
- Renesas U2A16
This shift reduces system fragmentation and improves response time.
How Is Intelligent Chassis Software Built?
Short answer:
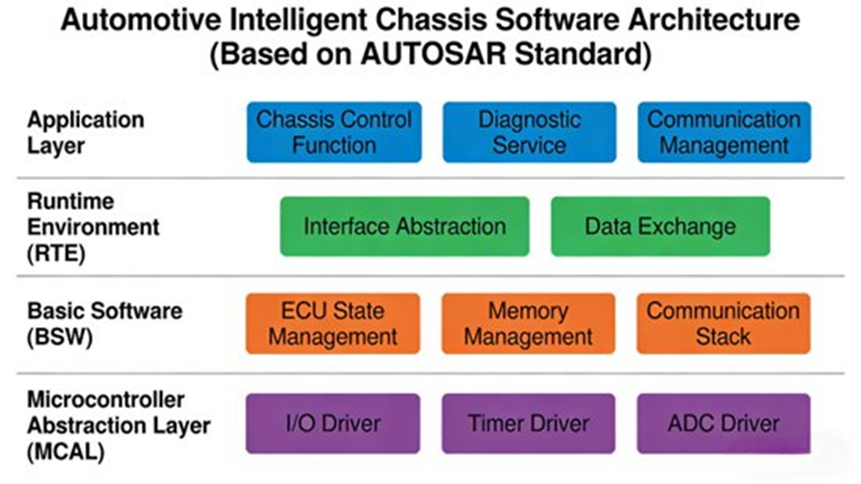
It uses a layered AUTOSAR structure to separate hardware and software.
Hardware Abstraction Layer (HAL)
- Connects software to hardware
- Includes drivers for sensors and actuators
Example:
- Brake system must react within milliseconds
- Steering needs precise angle control
Basic Software Layer (BSW)
- RTOS (QNX, VxWorks)
- Communication stack
- Diagnostics (ISO 14229)
- Safety checks (watchdog, redundancy)
- Memory management
This layer keeps the system stable and predictable.
Functional Software Layer
This is where control happens.
Brake-by-wire
- ABS, ESP, AEB
- Works with energy recovery
Steer-by-wire
- Variable steering ratio
- Path tracking (PID, MPC)
- Backup control
Active suspension
- CDC
- Air suspension
- Preview control
Multi-system coordination
- MPC
- Adaptive control
Application Layer
- Driving modes
- Road condition response
- Fault fallback
If something fails, the system switches to a safe mode.
What Control Algorithms Are Used?
Short answer:
MPC is the main method because it can handle multiple goals at once.
Model Predictive Control (MPC)
- Predicts future motion
- Handles limits (grip, angle)
- Balances safety and comfort
Example:
- During cornering, it controls yaw, roll, and steering together
Other methods
- PID → simple loops
- Adaptive control → adjusts parameters
- Reinforcement learning → learning-based control
Why Sensor Fusion Is Needed
Short answer:
No single sensor is reliable enough on its own.
Data sources
- Wheel speed
- Steering angle
- Acceleration
- Cameras, radar, LiDAR
- Powertrain data
- Cloud data (maps, V2X)
Fusion layers
- Sensor level → remove noise
- Domain level → estimate vehicle state
- Cross-domain → full system view
Methods
- Kalman filtering
- Bayesian estimation
This improves accuracy and timing.
How Safety and Security Are Handled
Short answer:
The system must meet ASIL-D safety level and protect against cyber threats.
Functional safety
- FMEA, FTA
- Redundant systems
- Fault detection
Example:
If a sensor fails, the system estimates the value instead.
Cybersecurity
- Encrypted communication
- ECU authentication
- Firewall
Prevents external control risks.
How Development Works in Practice
Short answer:
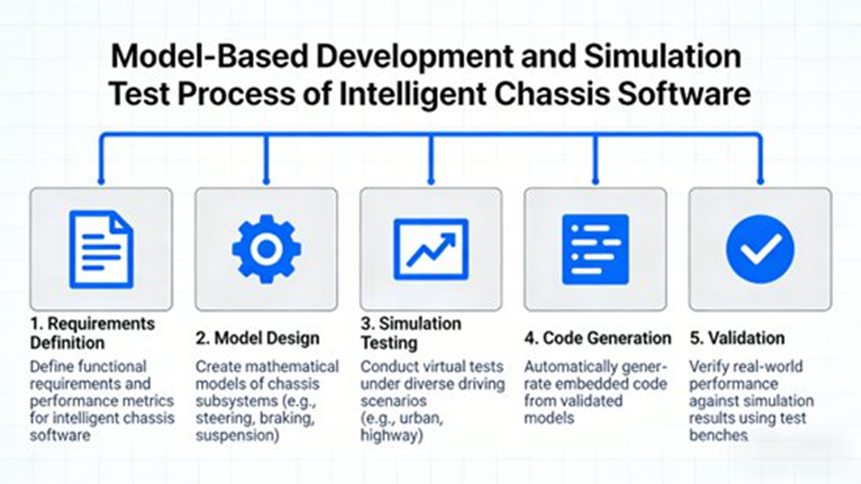
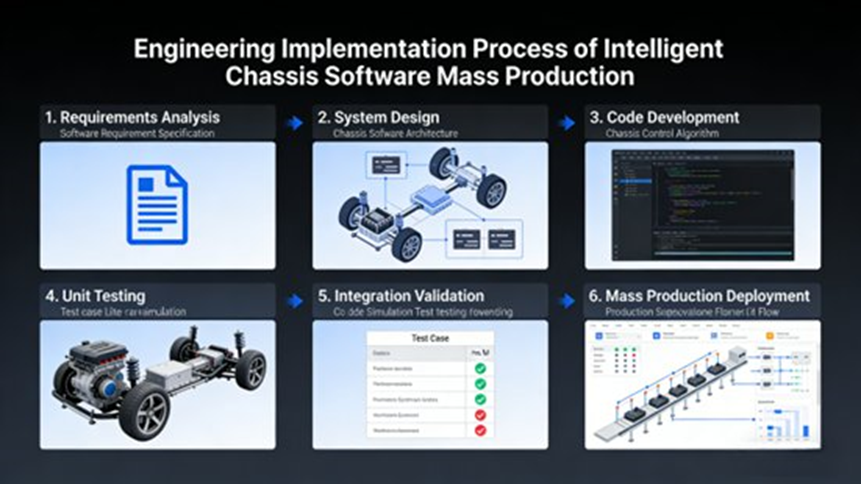
Development starts with models, then moves through simulation, hardware testing, and real vehicles.
Workflow
- Requirements
- Architecture
- Modeling
- Simulation
- Calibration
- Production + OTA
Model-Based Development (MBD)
- MATLAB / Simulink
- Auto code generation
Faster and reduces errors.
Testing stages
- MIL → algorithm check
- HIL → hardware test
- Vehicle → real-world validation
Real Project Results
- AEB response ≤ 80 ms
- Steering accuracy ≤ 0.08°
- Suspension response ≤ 40 ms
Results:
- 15% better energy recovery
- 10% more driving range
Main Challenges in Development
Short answer:
The biggest issues are coordination conflicts, timing limits, safety validation, and calibration effort.
Control conflicts
Brake, steering, and suspension may want different things.
Solution:
- MPC
- Dynamic weighting
Real-time limits
Heavy computation slows response.
Solution:
- Task priority
- Simplified models
- Better chips
Safety validation
Very complex and time-consuming.
Solution:
- Modular testing
- Automation tools
- Digital twin
Calibration difficulty
Different roads need different tuning.
Solution:
- Simulation + real tests
- AI-based tuning
- Parameter database
How Compute Power Affects the System
Short answer:
Performance depends on chip capability and task scheduling.
Key points
- Multi-core processors
- 100–500 TOPS
- CPU + GPU + NPU
Optimization
- Task priority
- Lightweight algorithms
- Edge computing
Future Direction
Short answer:
Chassis systems will become more data-driven and tightly integrated with other domains.
Trends
- AI-based control
- Cross-domain integration
- Higher compute
- Service-based software
- Standardized by-wire systems
These are required for higher levels of autonomy.
FAQs About Intelligent Chassis Software
Why is software-defined architecture important?
Short answer:
It allows centralized control and easier updates.
Modern chassis systems use DCU and AUTOSAR to separate hardware and software. This reduces complexity, supports OTA updates, and makes systems easier to scale for future vehicles.
What are the biggest challenges today?
Short answer:
System complexity and real-time performance are the main issues.
Engineers must handle multiple systems working together while meeting strict timing, safety, and security requirements. Legacy designs make integration harder.
How is MPC changing chassis control?
Short answer:
MPC allows one system to manage multiple control goals at once.
It predicts future states and adjusts control inputs under constraints like tire grip and steering limits. It is now the main approach for coordinated control.
What role does AI play?
Short answer:
AI helps systems adapt to drivers and road conditions.
It improves prediction, supports learning from data, and allows more flexible control strategies beyond fixed rules.
How do OEMs reduce development time?
Short answer:
By using model-based development and automation.
MBD, simulation tools, and automated testing reduce development time from months to much shorter cycles while improving consistency.
Author
Johnny Liu
CEO, Dowway Vehicle
Johnny Liu focuses on intelligent chassis systems, domain controllers, and EV software architecture, with hands-on experience in real vehicle programs.
Last updated: March 24, 2026
