

< Back to Automotive Intelligent & Software
Author: Johnny Liu, CEO at Dowway Vehicle
Date: March 6, 2026
Quick Summary:
What is the LKAS function? It is a core assist feature that uses cameras and sensors to track lane markings. If a car drifts, the system nudges the steering wheel to keep the vehicle centered. It works alongside the driver to stop crashes before they happen.
1. Why the LKAS Function Matters Now
As car tech moves toward L2+ capabilities, how we handle lateral control defines a vehicle’s edge. The LKAS function sits at the heart of this. Unlike old warning systems that just beep, LKAS takes action. It uses steering torque to keep the car steady. This tech bridges the gap between basic driving and full automation.
In the real world, this function has to deal with messy roads, bad weather, and how a car actually moves. Developers must follow ISO 26262 and ISO/PAS 21448 to keep things safe. This guide shows how we take LKAS from a concept to a mass-produced reality.
2. LKAS Architecture: How the Parts Move Together
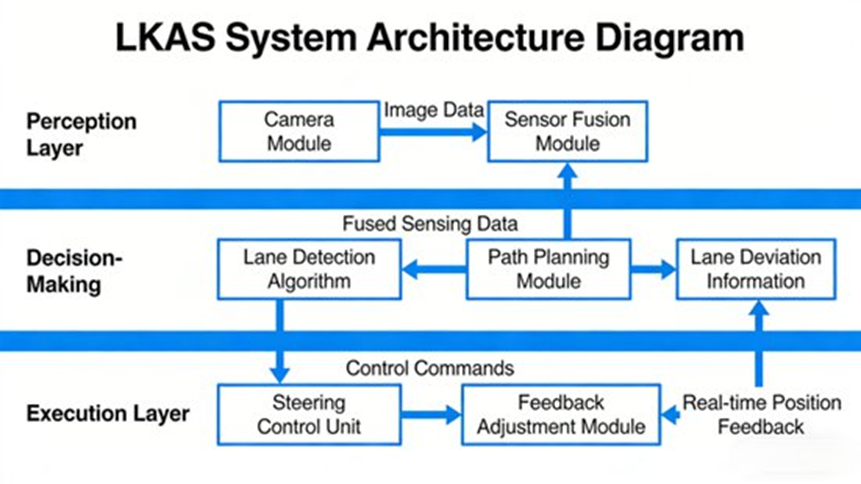
We build LKAS using a “Perception-Decision-Execution” loop. These parts talk to each other through the car’s internal network (CAN or FlexRay).
Perception: Seeing the Road
This layer gathers data on lane lines and vehicle pose.
- Front Camera: We use a 720P or higher camera at 30fps. It sits behind the mirror and sees 120°–150° ahead. It covers the road from 30m up to 150m. It has to spot white, yellow, solid, or dashed lines even in rain or glare. Per ISO 11270:2014, it needs at least 85% confidence in its recognition.
- IMU & Sensors: The IMU tracks yaw and lateral force at 100Hz. This fixes the small lag (usually $\le$0.3s) from the camera. Speed sensors also feed in data at 50Hz, as the system usually only kicks in between 60–150km/h.
Pro Tip: We calibrate cameras to keep errors under 0.1m. We also use Kalman filters to clean up the data so the system doesn’t twitch at “noise.”
Decision: Making the Call
The LKAS ECU acts as the brain. It must meet ASIL-B safety levels.
- Spotting a Drift: The system checks if the car is moving over the line without a turn signal. If the offset hits 0.15m or the angle is off by 2°, it acts. But if the driver fights back with 3.5N·m of force, the car gives control back immediately.
- The Math: We use MPC (Model Predictive Control) because it handles wind and curves better than basic PID. We cap the force at 3.5N·m so a human can always steer over it. Correction happens fast—a 0.5m mistake should be fixed in 2.5 seconds.
- Safety Backup: We track 21 types of fails. If the camera dies, the system shuts down and warns the driver within 200ms. If you take your hands off the wheel for 15 seconds, the car will beep, flash, and eventually slow down to a stop.
Execution: The Steering Muscle
The EPS (Electronic Power Steering) does the heavy lifting.
- Speed: It reacts in 50ms or less.
- Accuracy: It can adjust the wheel angle by as little as 0.1°.
- Safety: It uses dual motors. If one fails, you can still steer manually.
3. Fixing Tough Engineering Problems
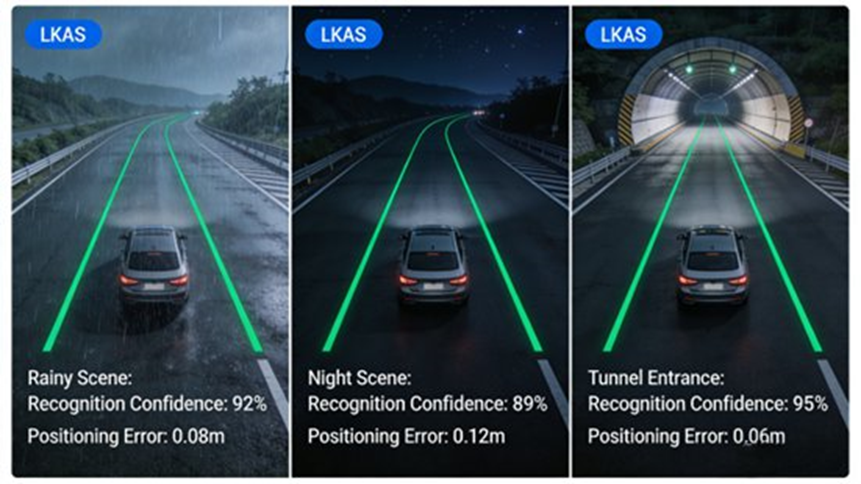
Making Cameras “See” Better
Rain, glare, and tunnels mess with cameras. We fix this by mixing in radar and HD maps. If the lines are faded, the radar looks at the road edge. We use deep learning to help the camera ignore “visual junk” and focus only on the path. If the camera loses the line for more than 5 seconds, it shuts off with a clear loud warning.
Handling Weight and Wind
A full car drives differently than an empty one. We store different driving models in the ECU. The system checks the car’s weight and speed, then tweaks the steering force. This stops the car from “snaking” down the road or feeling too stiff in a crosswind.
The Human Side

No one likes a steering wheel that jerks out of their hands. We smooth out the timing. The car gives a small visual hint on the HUD before it nudges the wheel. If the driver steers with 3.5N·m of force, the system backs off. We prioritize the person, not the code.
4. The Path to Mass Production
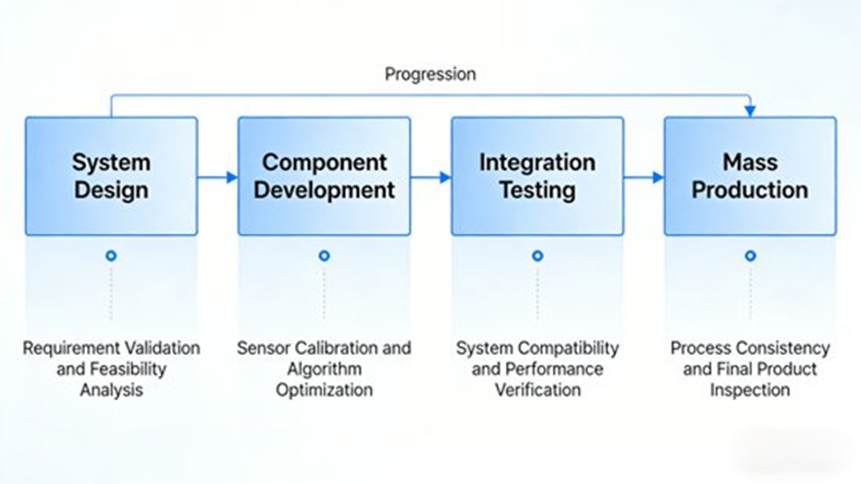
We follow a tight loop: Define -> Design -> Test -> Build.
- Rules: Set the speed range (60–150km/h) and safety goals (ASIL-B).
- Building: Pick car-grade parts that work from -40°C to 85°C. Write clean code that meets MISRA C rules.
- Testing: We use SIL and HIL (Hardware-in-the-Loop) to fake crashes and sensor fails before hitting the road.
- Launch: We finish with a 100,000 km road test to make sure the software doesn’t crash after months of use.

5. FAQ: Quick Answers on LKAS
What is the LKAS function exactly?
It is a safety tool that watches lane lines. If you drift without a blinker, it gently steers you back. It is more active than LDW, which just beeps.
How does the tech work?
A camera sees the lines. A computer (ECU) checks if you are drifting. A motor (EPS) nudges the wheels. It happens in milliseconds.
Is this a self-driving car?
No. This is Level 2 tech. You must keep your hands on the wheel and eyes on the road. The system will quit if you steer against it.
When will it fail?
It struggles in heavy snow, thick fog, or construction zones with messy lines. It also needs you to go over 60km/h usually.
Does it save lives?
Yes. It stops head-on hits and side-swipes from tired or distracted drivers. It is a safety net, not a driver replacement.
6. What’s Next?
LKAS is just the start. Soon, we will add LiDAR and even better AI to handle sharp city turns and rain. By mixing LKAS with cruise control (ACC) and emergency braking (AEB), cars are becoming safer and easier to drive. We are moving toward a world where the car and driver work as one team.
