

.png)
Dowway RWS relies on a “sensor – electronic control unit (ECU) – actuator” closed-loop control system to achieve precise rear-wheel steering:
- Signal Collection: Sensors (including vehicle speed sensor, front-wheel steering angle sensor, yaw rate sensor, and lateral acceleration sensor) real-time collect driving state data. For example, the vehicle speed sensor monitors current speed, and the front-wheel steering angle sensor captures the driver’s steering intention;
- Data Analysis & Decision-Making: The dedicated ECU receives signals from multiple sensors, processes and analyzes the data through pre-programmed control algorithms (such as proportional-integral-derivative (PID) control, model predictive control (MPC)), and judges the optimal rear-wheel steering angle and direction. For instance, when the vehicle speed is lower than 30km/h and the front-wheel steering angle exceeds 15°, the ECU decides to trigger opposite-phase rear-wheel steering;
- Actuation & Execution: The ECU sends control commands to the actuator (usually an electric motor with a deceleration mechanism). The motor drives the rear steering trapezoid or steering knuckle through the deceleration mechanism (such as worm gear, planetary gear), pushing the rear wheels to rotate to the target angle;
- Feedback & Adjustment: During the steering process, the system continuously monitors the actual steering angle of the rear wheels through the feedback sensor. If there is a deviation from the target angle, the ECU adjusts the motor output in real time to ensure steering accuracy.
-
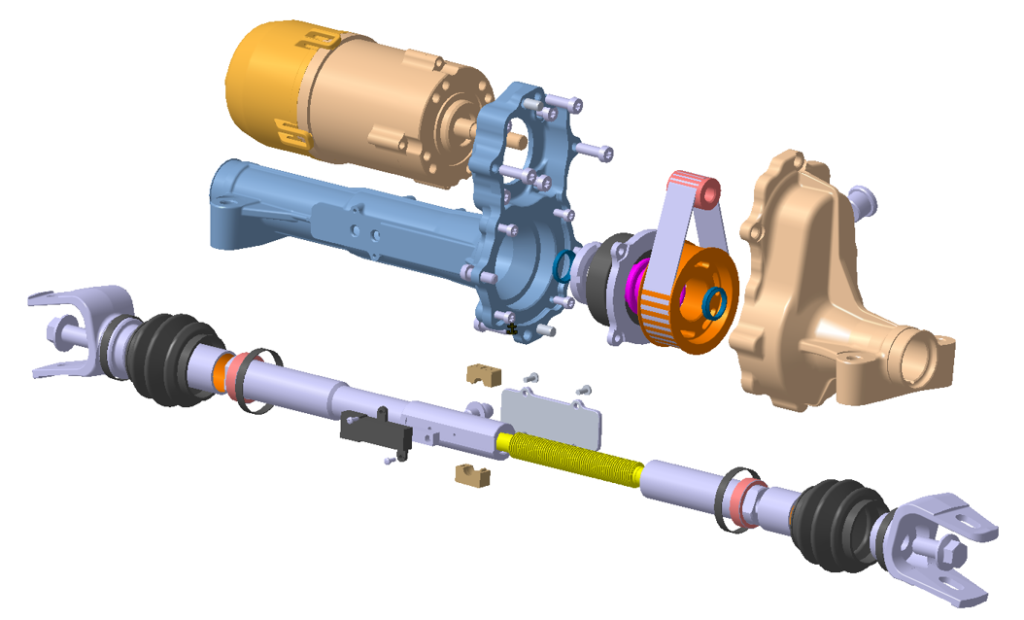
Rear-Wheel Steering Schematic Diagram
Core Advantages
- Improved Low-Speed Maneuverability: Opposite-phase rear-wheel steering reduces the vehicle’s turning radius by 10%-15% (taking a mid-size sedan as an example, the turning radius can be reduced from 5.5m to about 4.8m), making parking in narrow spaces and turning on narrow roads easier.
- Enhanced High-Speed Stability: Same-phase rear-wheel steering (usually with a steering angle of 1°-3°) reduces the vehicle’s yaw response time, making lane changes and emergency evasion more stable, and reducing the driver’s control burden.
- Adaptability to Multiple Scenarios: The system automatically switches steering modes according to vehicle speed and driving conditions (e.g., opposite-phase steering at low speed, same-phase steering at high speed, and zero steering angle when driving straight at high speed), without additional operation by the driver.
- Compatibility with Intelligent Driving: It can be integrated with advanced driver assistance systems (ADAS) such as automatic parking (APA) and lane keeping assist (LKA). For example, in automatic parking scenarios, the system cooperates with the front steering system to complete precise parking paths.
Technical Parameters
| Parameter Category | Parameter Name | Specification |
|---|---|---|
| Steering Performance | Maximum Rear-Wheel Steering Angle | ±12° (adjustable according to vehicle model) |
| Steering Response Time | ≤100ms (from receiving ECU command to reaching target angle) | |
| Steering Accuracy | ±0.1° (deviation between actual steering angle and target angle) | |
| Vehicle Speed Adaptability | Low-Speed Steering Mode Activation Speed | ≤30km/h (opposite-phase steering) |
| High-Speed Steering Mode Activation Speed | ≥80km/h (same-phase steering) | |
| Speed Range for Stepless Adjustment | 30km/h – 80km/h (steering angle gradually transitions from opposite-phase to same-phase) | |
| Actuator Performance | Drive Motor Type | Brushless DC Motor (BLDC) |
| Motor Power | 150W – 300W (depending on vehicle weight and steering load) | |
| Deceleration Mechanism Type | Worm Gear + Planetary Gear (transmission efficiency ≥85%) | |
| System Reliability | Working Temperature Range | -40℃ – 85℃ (adapts to extreme low-temperature and high-temperature environments) |
| Service Life | ≥150,000km (under normal working conditions) | |
| Fault Self-Diagnosis Function | Support (can detect sensor failure, motor failure, and ECU communication failure, and send fault codes to the vehicle OBD system) | |
| Control System | ECU Processing Speed | ≥50MHz (32-bit microcontroller) |
| Communication Protocol | Support CAN FD (for high-speed data transmission with vehicle controller) | |
| Control Algorithm | PID Control + Model Predictive Control (MPC) |
4. Application Scenarios
- Mid-to-High-End Passenger Cars: Used to improve driving comfort and handling performance, meeting the high requirements of consumers for vehicle control.
- New Energy Vehicles (NEVs): Compatible with the electronic control architecture of NEVs, and can be optimized for energy consumption (e.g., reducing motor power consumption when steering is not needed).
- Performance Vehicles: Provides more precise steering control, enhancing the vehicle’s handling limits in high-speed driving and cornering scenarios.
- Commercial Vehicles (Light-Duty): Applied to light commercial vehicles (such as 7-seater MPVs) to improve maneuverability in urban transportation and parking.






Reviews
There are no reviews yet.