


A steer-by-wire (SBW) system removes the mechanical link between the steering wheel and the wheels. Instead, it uses sensors, actuators, and redundant electronic control units (ECUs) to control steering through a closed-loop system that meets ASIL-D safety requirements.
- What Is a Steer-by-Wire System Architecture?
- What Are the Core Components of a Steer-by-Wire System?
- How Does a Steer-by-Wire System Work?
- What Control Technologies Power Steer-by-Wire Systems?
- How Is Road Feel Simulated in Steer-by-Wire?
- Why Does Steer-by-Wire Require Full Redundancy?
- What Are the Main Engineering Challenges of Steer-by-Wire?
- What Are Real-World Applications of Steer-by-Wire?
- What Is the Current Market Status of SBW?
- What Are the Future Trends of Steer-by-Wire?
- Why Steer-by-Wire Is Critical for Autonomous Driving
- Frequently Asked Questions About Steer-by-Wire (SBW)
- Key Takeaways
- 👤 Author
- ⚠️ Disclaimer
- No mechanical steering column
- Built on HWA, RWA, ECU, sensors, and communication
- Works through real-time closed-loop control
- Requires full redundancy for safety
- Supports autonomous driving and flexible cabin layouts
- Still costs 3–4× more than EPS (dropping over time)
There’s a point in every SBW project where the conversation shifts.
Not “how do we improve steering?”
But — “what happens if the system fails?”
Because once you remove the mechanical connection, there’s no fallback.
Everything depends on electronics, control logic, and how well the system is designed.
What Is a Steer-by-Wire System Architecture?
Steer-by-wire is a fully electronic steering system where driver input is converted into digital signals and executed by actuators instead of a physical linkage.
Evolution of Steering Systems
- Mechanical Steering (MS)
→ No assist, slow response (>300 ms) - Hydraulic Power Steering (HPS)
→ High energy use (>200W), fixed behavior - Electric Power Steering (EPS)
→ Lower energy (~50W), faster response (80–100 ms), ASIL-B - Steer-by-Wire (SBW)
→ Fully electronic, no mechanical link, ASIL-D
👉 What this really means:
Steering is no longer hardware-driven — it’s software-driven.
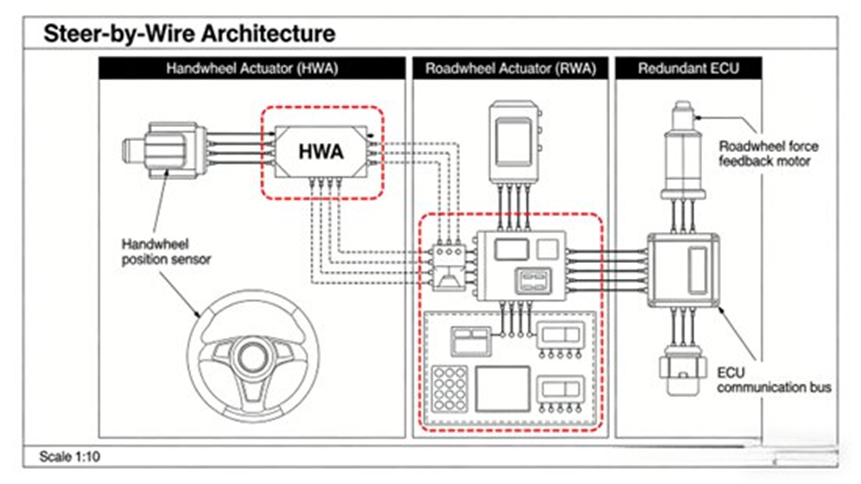
What Are the Core Components of a Steer-by-Wire System?
A steer-by-wire system combines input, control, and execution layers into one integrated architecture.
Hand Wheel Actuator (HWA)
This is where the driver interacts with the system.
- Steering angle: ±1080°
- Accuracy: ±0.1°
- Torque sensing: ±15 Nm
- Generates artificial road feedback
Common structures:
- Belt-driven
- Worm gear
- Direct drive (used in high-end systems)
👉 Real issue here:
If the feedback feels off, drivers lose confidence immediately.
Road Wheel Actuator (RWA)
This part handles actual wheel movement.
- Response: millisecond level (about 30% faster than EPS)
- Precision: ±0.1°
- Power density: ≥2.5 kW/kg
- Operating range: -40°C to 125°C
Types:
- Linear actuation
- Rotary (supports four-wheel steering and lateral movement)
Redundant ECU System
This is where safety is enforced.
- Dual MCU
- Dual power supply
- Dual communication
- Dual motor windings
- Failure rate target: 4.5 FIT
👉 If redundancy is weak, the system is not safe. Simple as that.
Sensors and Communication
The system depends on real-time data:
- Angle sensors
- Torque sensors
- Vehicle speed, yaw, and dynamics
- CAN / Automotive Ethernet
How Does a Steer-by-Wire System Work?
SBW runs as a closed-loop system that constantly adjusts steering based on input and feedback.
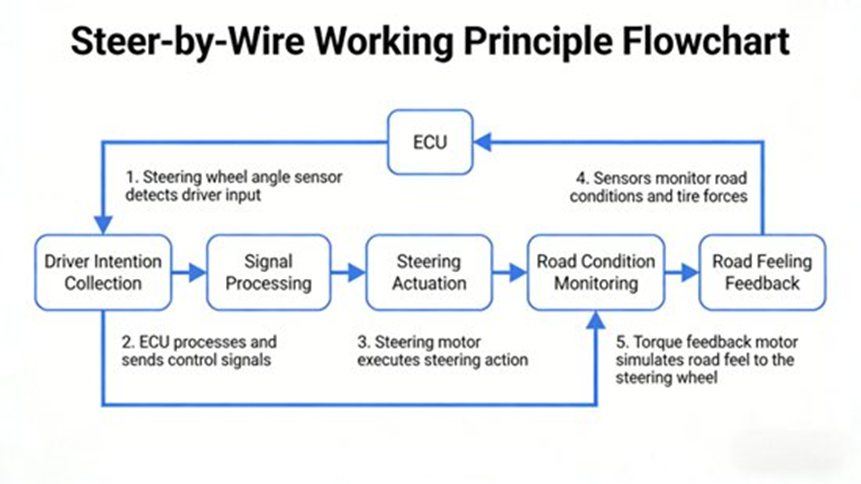
Process:
- Driver input captured (HWA)
- ECU calculates response
- RWA executes steering
- Sensors provide feedback
- HWA recreates road feel
👉 Important detail:
The system controls both movement and perception at the same time.
What Control Technologies Power Steer-by-Wire Systems?
SBW relies on advanced control methods to keep steering stable and predictable.
- Model Predictive Control (MPC)
- Kalman filtering
- Variable steering ratio (12:1–16:1)
Example:
- Low speed → quick steering response
- High speed → slower, more stable response
How Is Road Feel Simulated in Steer-by-Wire?
Road feedback is created using data, not mechanics.
Inputs:
- Tire interaction
- Road surface
- Vehicle motion
Output:
- Adaptive damping
- Torque feedback through HWA
👉 This is where systems either feel natural… or completely wrong.
Why Does Steer-by-Wire Require Full Redundancy?
Because there is no mechanical backup, the system must stay functional even if something fails.
Redundancy layers:
- Perception
- Control
- Execution
- Communication
- Power
- Safety level: ASIL-D
What Are the Main Engineering Challenges of Steer-by-Wire?
The biggest challenges are reliability, cost, and integration.
Reliability Validation
- Lifetime: 15 years
- Distance: 240,000 km
- Bench test: >10,000 hours
- Real-world testing: millions of km
Cost
- Current: 3–4× EPS
- Expected drop: ~30% by 2026
Integration
- Works with:
- ADAS
- ESP
- Powertrain
- Requires 48V electrical system
EMC (Electromagnetic Compatibility)
- Shielding and filtering required
- Must meet ISO 11452
👉 Often overlooked, but critical for system stability.
What Are Real-World Applications of Steer-by-Wire?
NIO ET9
- Four-layer redundancy
- Independent four-wheel steering
Bosch Huayu
- Dual controller
- Six-phase motor
Dekon
- Torque: 15.5 Nm
- Works with domain controllers
What Is the Current Market Status of SBW?
- 2026: large-scale production starts
- Market size:
- 2026: ~$70B
- 2030: ~$200B
- Localization: >50%
What Are the Future Trends of Steer-by-Wire?
Short answer: Integration, smarter control, lighter systems, and lower cost.
Details:
- Integration
- Steering + braking + suspension (VMC)
- Smarter control
- AI-based adjustments
- Predictive steering
- Lightweight design
- Aluminum
- Carbon fiber
- Cost reduction
- Platform standardization
- Local supply chain
- Goal: similar cost to EPS by 2030
Why Steer-by-Wire Is Critical for Autonomous Driving
Short answer: It allows full control by software.
More detail:
- No steering column needed
- Flexible interior layout
- Direct control from algorithms
- Better response than mechanical systems
👉 Without SBW, high-level autonomy is hard to achieve.
Frequently Asked Questions About Steer-by-Wire (SBW)
Is it safe to remove the mechanical steering connection completely?
Short answer: Yes, if full redundancy and fail-operational design are in place.
More detail:
Recent regulations like China GB17675-2025 allow fully electronic steering without mechanical backup. This requires dual ECUs, redundant sensors, power systems, and defined fallback modes where the vehicle remains controllable or stops safely.
What are the biggest engineering challenges in SBW?
Short answer: Reliability, steering feel, and system integration.
More detail:
SBW requires long-term validation (15 years, 240,000 km), precise tuning for realistic steering feel, and tight integration with ADAS, braking, and vehicle dynamics systems.
Why is SBW critical for autonomous driving?
Short answer: It allows steering to be controlled directly by software.
More detail:
SBW removes mechanical constraints and enables precise, fast control from algorithms. It also integrates easily with AI-based driving systems.
What are the main barriers to large-scale adoption?
Short answer: Cost, safety concerns, and regulations.
More detail:
SBW is still more expensive than EPS, depends fully on electronic systems, and must meet strict standards like ISO 26262 and UN R79.
What trends are shaping SBW systems?
Short answer: Integration, AI control, flexible design, and cost reduction.
More detail:
Future systems will combine steering, braking, and suspension, use predictive control, allow new vehicle layouts, and become more affordable as production scales.
Key Takeaways
- SBW replaces mechanical steering with electronic control
- Safety depends on redundancy and system design
- Control algorithms define driving feel
- Integration is the hardest part
- It is a key technology for autonomous vehicles
👤 Author
Johnny Liu
CEO, Dowway Vehicle
Johnny Liu has over 10 years of experience in chassis systems and by-wire technologies, working on SBW architecture, redundancy safety, and vehicle control systems across multiple OEM projects.
Last Updated: March 24, 2026
⚠️ Disclaimer
This content is for technical reference only and does not replace engineering standards or regulatory requirements.
