

< Back to Automotive Intelligent & Software
By Johnny Liu, CEO at Dowway Vehicle
Published: March 6, 2026 | Category: Autonomous Driving Technology
When I first started working on vehicle automation, parking was one of the biggest headaches for drivers. Today, cars are getting smarter, and drivers want features that make life easier and safer. The Automatic Parking Assist (APA) function has grown from a rare add-on to a standard feature in many cars.
Instead of struggling with the steering wheel, a driver can let the APA system use its sensors to find a spot and handle the steering, braking, and shifting. This stops parking lot scratches and helps new drivers park without stress.
Building an APA function is hard work. It mixes sensor hardware, computer vision, and control engineering. As engineers, we have to balance what works in a lab with what feels safe and natural to a real driver. Here is exactly how we build and test it.
1. Overall System Architecture of the APA Function
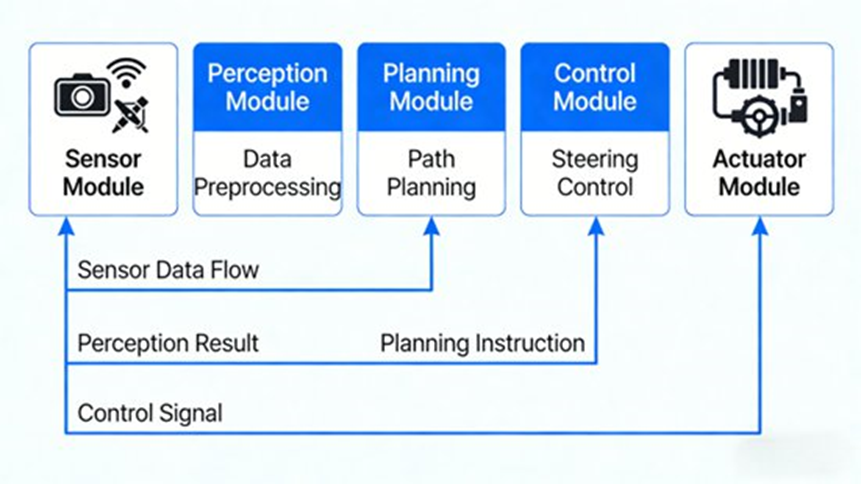
We build the APA system using five clear layers. They talk to each other through the car’s Ethernet and CAN bus. They also connect to the screen (HMI) and a safety monitor to keep everything running smoothly.
The Perception Layer: The Eyes
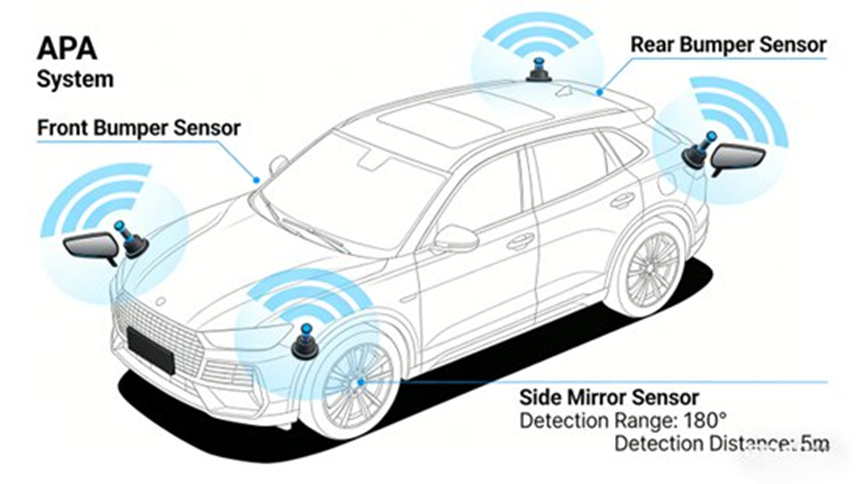
This layer looks at the world outside. We usually use a mix of ultrasonic radars and surround-view cameras.
- Ultrasonic Radars: We put 12 of these on the car (4 front, 4 back, 2 on each side). They detect things from 0.15 to 4.5 meters away. They are cheap and work well in bad weather.
- Surround-View Cameras: Four fisheye cameras give a 360-degree Bird’s Eye View (BEV). They spot the painted lines on the ground.
- Auxiliary Sensors: The IMU, wheel speed sensors, and steering angle sensors tell the car how fast it is going and where it is pointing.
The Fusion Layer: Data Processing
Cameras hate bad light, and radar cannot always tell what an object is made of. We fix this by fusing the data.
- First, we sync the timing of the data.
- Then, we use Kalman filtering to blend the radar distances with the camera lines. This gives the car a single, clear map of the world, updating at least 10 times a second (≥10Hz).
The Decision and Planning Layer: The Brain
This is where the car figures out what to do.
- Spot Recognition: It looks for parallel, perpendicular, or diagonal spots. It demands a success rate of >98%.
- Mode Decision: In under 100 milliseconds, it decides how to steer in, and whether it needs to make multiple small turns to fit.
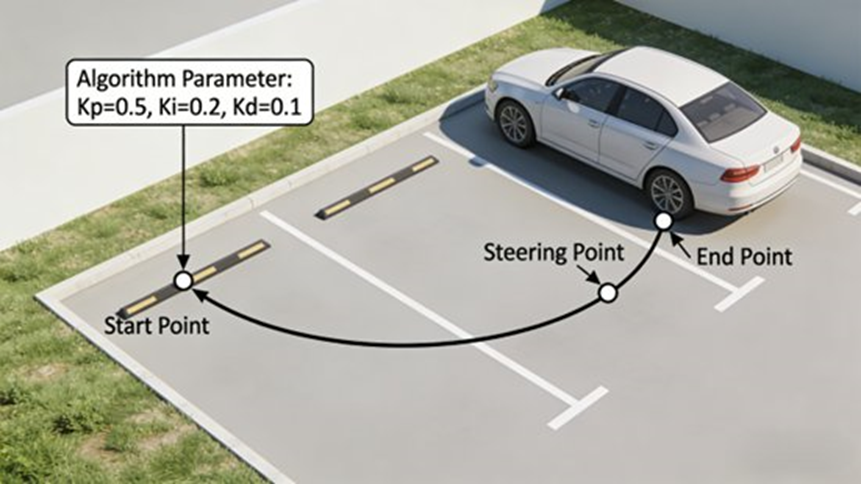
- Path Planning: Using the A* algorithm or the Dynamic Window Approach (DWA), it draws a safe path based on the car’s wheelbase and turning radius.
The Control and Execution Layer: The Hands and Feet
The control layer uses the Model Predictive Control (MPC) algorithm to tell the car’s hardware what to do.
- Steering (EPS): Responds in under 100ms, staying accurate within ±0.5°.
- Braking (ESC/EPB): Controls braking smoothly with an error margin of just ±0.1m/s².
- Driving/Shifting (PCM/TCM): Keeps the speed between 0.5 and 3 km/h and shifts the gears (D/R/P) for you.
HMI and Safety Monitoring
The HMI displays the car’s path on the dashboard screen. The safety monitor watches for trouble. If something breaks, it reacts in ≤50ms. It must keep false alarms under 1% and missed alarms under 0.1%.
2. Core Technical Challenges and Engineering Solutions
Fixing Sensor Confusion
- The Problem: Rain or bright sun confuses sensors.
- The Fix: We use an adaptive weight algorithm. If it rains, the system trusts the radar more. On a sunny day, it trusts the cameras more.
Reading Tricky Parking Spots
- The Problem: Faded lines, weirdly shaped spots, or traffic cones get in the way.
- The Fix: We train Convolutional Neural Networks (CNN) to read the lines, and build 3D models with the radar to ignore temporary junk. We specifically tune this for narrow, complex spots.
Keeping the Ride Smooth
- The Problem: The car shouldn’t jerk the steering wheel aggressively.
- The Fix: We smooth the path using B-spline curves. This keeps the ride comfortable while making sure the final parking job is accurate within ±10cm.
Hardware Sync
- The Problem: The steering and braking commands can fall out of sync.
- The Fix: We run MPC+PID fusion algorithms to keep the hardware working together. If a part fails, the OBD system logs the fault and safely stops the car.
3. APA Function Development Process Management
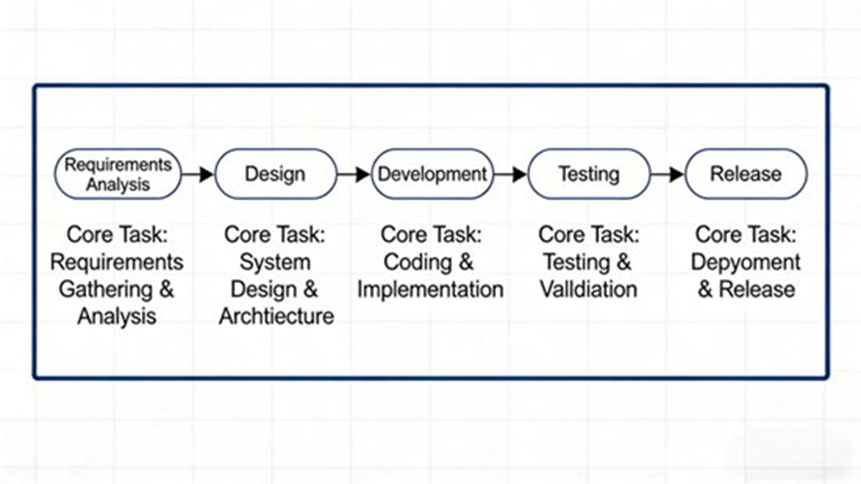
We follow a strict V-model to build the software:
- Requirements (SRS): We set the rules. The car must park successfully >95% of the time. The spot must only be the car’s width plus 60cm. Everything must meet ISO 26262 ASIL-B safety rules.
- System Design: We pick reliable hardware and check all the connections.
- Software Development: Engineers write the code in C/C++ following strict MISRA C rules, then test each piece.
- Integration and Calibration: We take the car out of the lab. We tune the radar and cameras in the rain, at night, and in dark underground garages.
- Mass Production: We do small test runs to hit a ≥99.5% pass rate. Later, we fix bugs using Over-The-Air (OTA) updates based on driver feedback.
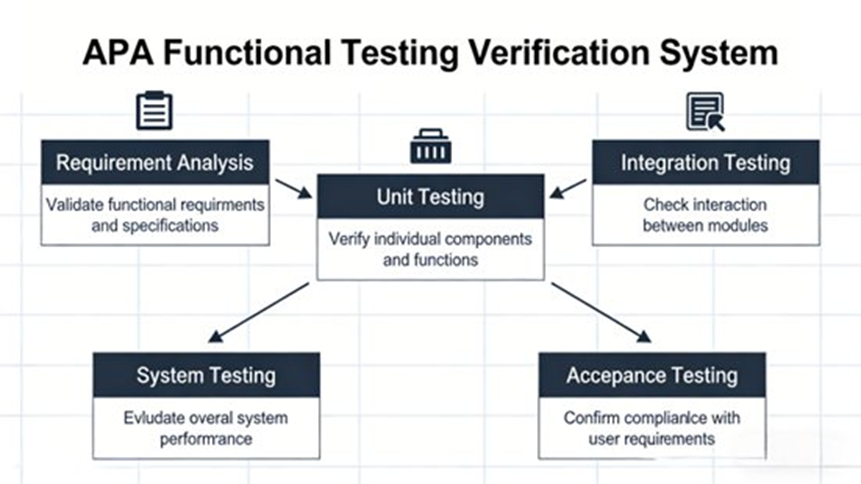
4. Comprehensive Testing and Validation System
Laboratory Testing
We use software like Carsim and Prescan to test the code. We intentionally break things in the simulation to make sure the car reacts in under 50ms.
Real-Vehicle Road Testing
We take the cars outside. They have to park in standard spots, spots with faded lines, and on slopes up to 5°. We test them in extreme heat (85℃) and freezing cold (-40℃).
Scenario-Based User Testing
We put real people—both new drivers and experts—in the car to see if the dashboard screen makes sense to them.
Strict Acceptance Criteria
Before we sell it, the APA must handle multi-segment parking, recognize spots 98% of the time, park successfully 95% of the time, stay within ±10cm of the target, and react to everything in under 1 second.
5. Frequently Asked Questions (FAQs) About the APA Function
Q1: What is Automatic Parking Assist (APA)?
Short Answer: It is a system that steers, brakes, and accelerates to park your car for you.
Details: APA is an Advanced Driver Assistance System (ADAS). It uses sensors and software to find a spot, plan a safe path, and maneuver the car into parallel, perpendicular, or angled spaces with almost no help from the driver.
Q2: How does an APA system actually work?
Short Answer: It looks at the area, finds a gap, plans a path, and turns the wheel to get there.
Details: It runs a constant loop. First, sensors scan the area. Second, it measures the gap between cars. Third, it calculates a safe path based on how the car turns. Finally, it takes control of the steering and brakes to follow that path.
Q3: What sensors are primarily used in APA systems?
Short Answer: Mostly ultrasonic radars and cameras.
Details: Ultrasonic sensors measure close distances. Surround-view cameras look for painted parking lines. Some high-end cars add radar or LiDAR to build better 3D maps of moving objects.
Q4: What are the current limitations of APA systems?
Short Answer: Bad weather blinds the cameras, tight spaces confuse it, and you still have to watch it work.
Details: Heavy rain, snow, or bad lighting can shut down the camera logic. Sensors also have blind spots. Because APA is a Level 2 system, the driver must stay in the seat and be ready to hit the brakes if something goes wrong.
Q5: How is APA different from Autonomous Valet Parking (AVP)?
Short Answer: APA requires you to sit in the car. AVP lets you walk away while the car parks itself.
Details: APA is a Level 1 or 2 system that helps you park in a spot right next to you. AVP is a Level 4 system. With AVP, you can get out at the door, and the car will navigate the whole parking lot by itself, often using smart cameras built into the parking garage.
6. Future Trends
The APA function connects sensor hardware with smart vehicle mechanics. Looking ahead, we will see more cars using LiDAR to park in worse weather. Engineers are also using Deep Learning to create “Memory Parking” so the car learns your driveway. Eventually, these parking features will link smoothly with highway driving features like ACC (Adaptive Cruise Control) and LKA (Lane Keeping Assist).
