


< Back to Performance Development
By Johnny Liu, CEO at Dowway Vehicle | Published: February 2026
💡 Key Takeaways
- Steering performance connects the driver, vehicle, and road. It directly controls safety, handling, and daily driving comfort.
- The auto industry is moving from standard Electric Power Steering (EPS) to Steer-by-Wire (SBW) setups. These new systems meet the strict functional safety rules (ASIL-D) and fast response times required by self-driving cars.
- Engineers use a closed-loop V-Model process. They mix computer simulations (CAE) and real-world testing to balance crisp road feel with battery efficiency.
1. Introduction: The Evolution of Steering Performance
The steering system sits at the heart of an automotive chassis. It connects your hands to the wheels and the road, dictating vehicle safety, handling stability, and driving comfort.
As cars become more electric and intelligent, drivers expect more than just basic mobility. They want precision, comfort, and safety. Also, autonomous driving systems demand faster response times and better active control. Poor steering—like a huge delay, poor returnability, or loose precision—can cause a car to drift off course and make emergency swerving dangerous.
Engineers no longer just guess and test on a track. Today, we use a closed-loop system with computer simulations and Model-Based Design (MBD). This approach balances performance, low energy consumption, and safety right from the start.
2. Classification of Steering Systems and Their Impact
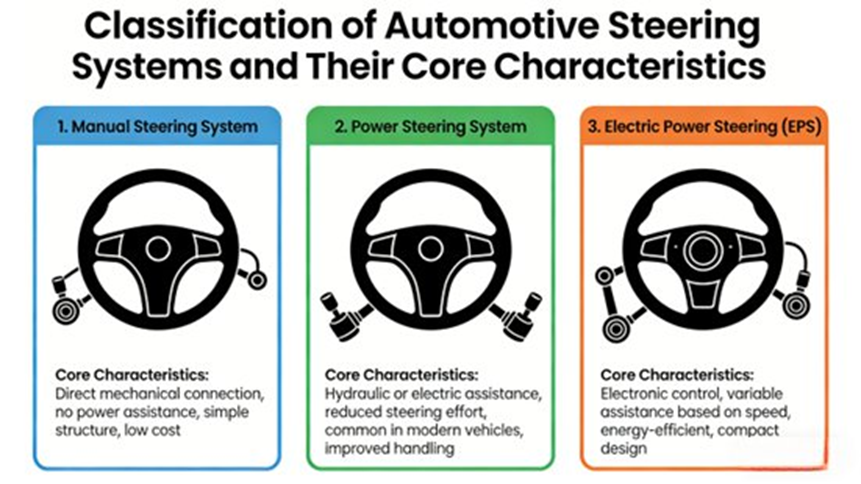
The mechanical architecture of a steering system sets the hard limits on how well it can perform. Here are the main types builders use:
- Mechanical Steering System (MS): This setup relies entirely on the driver’s muscle power using rack-and-pinion or recirculating ball gears. It is very reliable, but the heavy resistance makes low-speed parking incredibly difficult. You rarely see this in modern passenger cars.
- Hydraulic Power Steering (HPS): An engine-driven pump creates high-pressure fluid to help you turn the wheel. It makes low-speed driving easy but constantly drains engine power, raising fuel use by about 5%. It also carries fluid leakage risks. Today, builders mostly use it for heavy trucks.
- Electric Power Steering (EPS): Most everyday cars use this setup. A computer reads your vehicle speed and steering torque, then tells an electric motor to help out. It gives you 3 to 5 times more assist at low speeds (under 40 km/h) for easy parking. At highway speeds (over 80 km/h), it reduces the assist to keep the car stable. EPS uses 3% to 5% less energy than hydraulic systems.
- Steer-by-Wire (SBW): This is the setup built for autonomous driving. It completely removes the physical steering column connecting the steering wheel to the tires. Instead, sensors read your steering angle, and a computer tells a motor at the wheels what to do. It responds 30% faster than EPS. Current legal rules limit its widespread use, but it is the future standard.
3. Core Evaluation Indicators for Steering Performance
To make steering precise, responsive, smooth, and safe, the industry tracks strict objective numbers and real-world feelings.
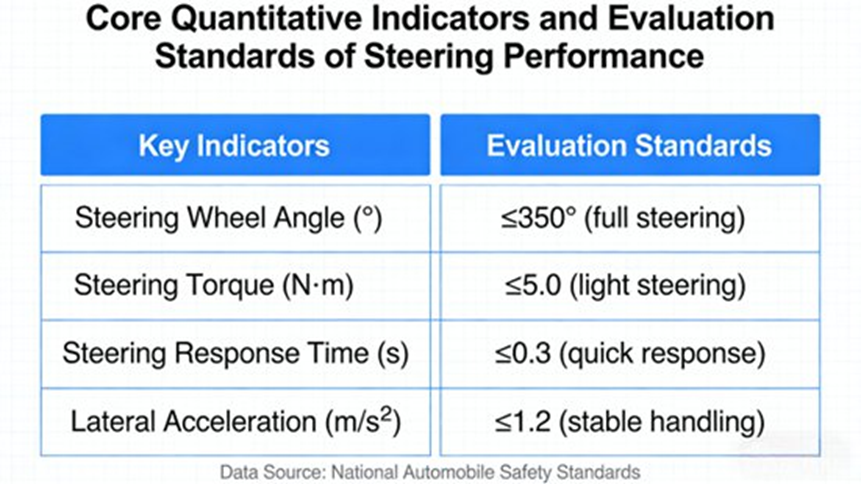
3.1 Quantitative Indicators (Objective & Measurable)
- Steering Precision: We measure transmission ratio error (under 3%), return accuracy (angle deviation under 0.5°), and dead zone play (under 3° at high speeds like 120 km/h).
- Responsiveness: Engineers look for a steering response time under 50 ms, hysteresis under 100 ms, and an end-to-end delay under 10 ms for SBW setups using fast network protocols.
- Operational Smoothness: We check torque fluctuation (under 0.3 N·m), speed-based assist curves (between 5-8 N·m at low speeds and 12-15 N·m at high speeds), return time (under 3 s), and valid road feedback (between 0.5 and 1.2 N·m).
- Safety & Reliability: The system needs a stiffness over 2000 N·m/rad and a fail-safe backup (keeping physical torque under 15 N·m if the EPS motor quits).
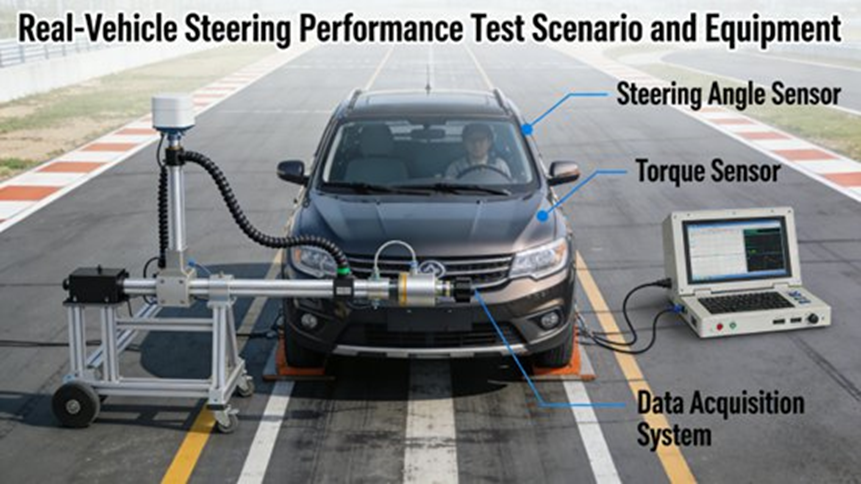
3.2 Subjective Evaluation (Real-Vehicle Experience)
Professional test drivers evaluate the cars across different tracks. They check if the steering feels natural, if the road feedback is clear without harsh jolts, if the wheel returns to center smoothly, and if the car handles limit maneuvers—like emergency lane changes—without spinning out.
4. The Closed-Loop Development Process
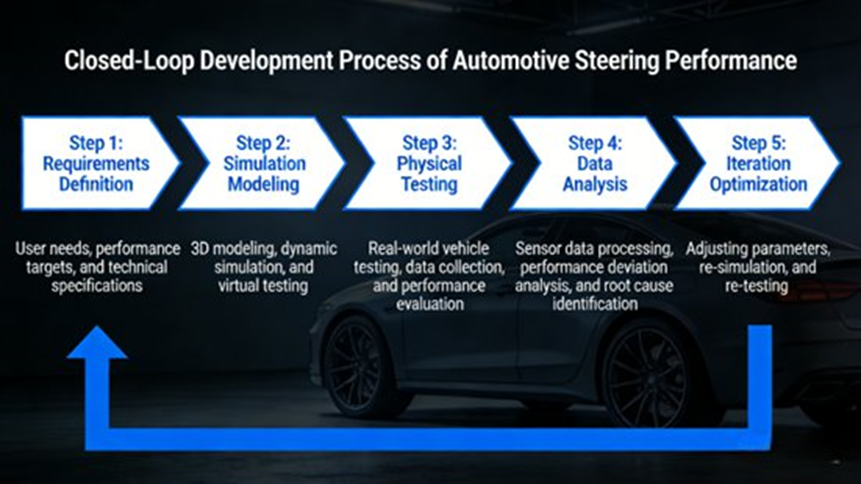
Modern engineering follows a strict V-Model path to build these systems:
- Phase 1: Requirement Definition & Target Breakdown: We match the steering goals to the vehicle type. A sports car needs a sharp road feel, while an EV needs a highly efficient motor (consuming under 50W). We also map out strict safety rules.
- Phase 2: System Architecture & Core Parameter Design: We define the mechanical layout. For example, we set the steering ratio between 12.5:1 and 14:1 for regular cars. We also pick the motor power (100 to 300W) and write the control algorithms.
- Phase 3: CAE Simulation & Parameter Optimization: Using software tools, we run computer tests for normal driving, limit handling, and motor failures to fix hardware conflicts early.
- Phase 4: Real-Vehicle Testing & Validation: We collect hard data on test tracks. For instance, a sedan’s static pull force must stay under 60N. Test drivers also give their personal feedback on how the car feels.
- Phase 5: Iterative Optimization & Mass Production: We loop through testing and fixing until the car meets all targets. We make sure factory production stays consistent, keeping parameter deviations under 5%.
5. Key Technologies Driving Modern Performance
- 5.1 EPS Control Tech: Software adjusts the assist based on vehicle speed. It forces the wheel to return to center in under 3 seconds and uses damping math to smooth out torque bumps.
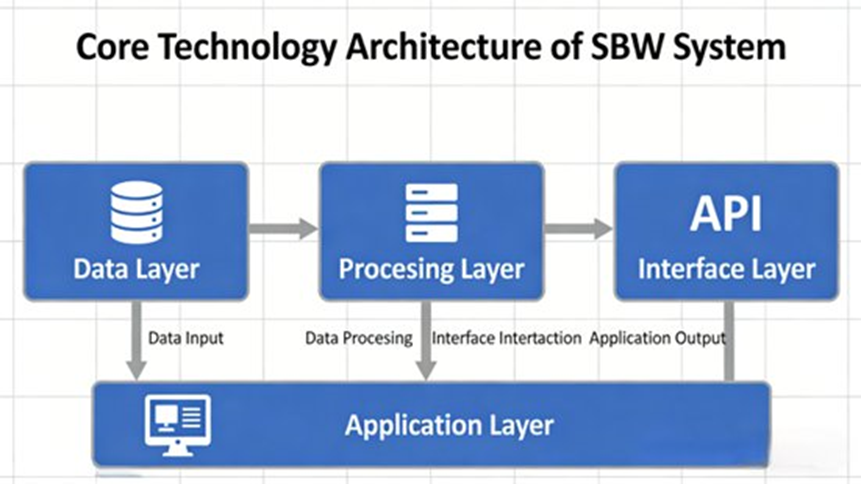
- 5.2 SBW Core Innovations: Steer-by-Wire relies on high-resolution sensors (accurate to 0.05°) and ultra-fast active control. Because there is no mechanical link, it requires dual computers, dual power lines, and dual networks to prevent dangerous failures.
- 5.3 CAE & Multidisciplinary Co-Simulation: Engineers link mechanical, control, and vehicle dynamics models together in software to fix geometry errors and minimize stress on parts before building a physical prototype.
- 5.4 Autonomous Driving Synergy: The steering must switch smoothly between human driving and autonomous modes. It tracks lanes with an accuracy of 0.1° and provides vibration feedback to the driver’s hands.
6. Current Challenges in Engineering
- Balancing Conflicting Goals: It is tough to give a driver crisp road feel while keeping the ride comfortable, or to provide strong motor assist while keeping battery use low.
- Autonomous Driving Safety: Building self-driving systems that meet strict ASIL-D safety rules requires heavy redundancy. If a sensor fails, the car still needs a reliable way to steer.
- Multi-System Complexity: The steering has to talk to the brakes and suspension. If a single motor brakes hard on an EV, the steering system must auto-correct the yaw pull.
- Extreme Condition Adaptability: The hardware and software must work perfectly in freezing cold (-30°C), extreme heat (50°C), high altitudes, and on slippery roads.
7. Future Trends

- Steer-by-Wire and V2X: As laws change, SBW will replace EPS. Cars will talk to the road infrastructure (V2X) to adjust steering angles before the vehicle even enters a blind curve.
- Smart Control: Artificial intelligence will learn how you drive. It will adjust the steering weight to your personal preference and update itself over the air (OTA).
- Chassis Domain Control: Future systems will handle steering, braking, and suspension all from one central computer to keep the car perfectly flat and stable.
- Lighter Parts and Lower Energy: Builders are swapping steel for aluminum and carbon fiber to cut steering system weight by over 20%.
- SOTIF and Cybersecurity: Engineers are looking beyond basic safety limits. They are adding heavy cybersecurity layers to stop hackers from taking remote control of the steering wheel.
8. Final Thoughts
Building an automotive steering system takes complex mechanical design, software coding, and track testing. The goal is simple: make the car do exactly what the driver wants. As the industry shifts to battery power and self-driving modes, we are moving from basic electric racks to fully digital Steer-by-Wire setups. Overcoming hardware and software hurdles will make future cars smarter, tighter, and safer on the road.
9. Frequently Asked Questions (FAQ) on Steering Performance
Q1: How do you improve steering performance and ensure smooth turning in a vehicle?
Achieving smooth, predictable steering relies on a harmony of well-tuned parts working together:
- Ackermann Steering Geometry: This setup ensures the inner and outer wheels turn at the correct, differing angles during a corner, preventing the tires from scrubbing the asphalt.
- Appropriate Rack & Pinion Sizing: The steering gear must perfectly match the vehicle’s weight.
- Positive Caster Angle: This angle creates high-speed stability and helps the steering wheel naturally snap back to center after a turn.
- Suspension & Linkages: Tight steering rods combined with independent suspension reduce dead zone play and maximize tire grip.
Q2: Why do many drivers feel Electric Power Steering (EPS) lacks “feel” compared to older hydraulic systems?
Many early or basic EPS systems focus heavily on cutting physical effort and saving fuel. Because they use an electric motor, they can filter out too many road vibrations, leaving the driver feeling cut off from the tires.
However, high-performance sports cars use software to carefully tune the motor’s torque curve. This gives drivers great analog feedback combined with digital precision.
Q3: How does steering geometry influence vehicle handling?
Steering geometry is the mechanical math that decides how a car responds to your hands. Kingpin and caster angles control straight-line stability. Standard Ackermann geometry improves low-speed turning for daily driving. On the track, race cars often use reverse Ackermann geometry to force the outside tire to grip harder at high speeds.
Q4: What causes common steering performance issues (e.g., hard steering, poor return, or excessive play)?
If your steering feels heavy or sloppy, check these areas:
- Incorrect tire alignment is the most common reason for heavy handling.
- Low power steering fluid in older cars or dry joints makes turning physically hard.
- Worn-out tie rods or ball joints add loose play.
- A poorly adjusted steering gear ruins the mechanical return to center.
Q5: What is the “steering ratio” and how does it affect vehicle dynamics?
The ratio is how many degrees you must turn the steering wheel to pivot the road tires one degree. A lower ratio (like 11:1) gives you fast, direct steering for a sporty, responsive feel. A higher ratio (like 16:1) requires more turning but gives a very relaxed, stable ride for daily commutes.
📌 Advanced Steering Concepts to Know
- Dynamic Steering Response: This software actively changes the steering weight based on how fast you drive.
- Bump Steer: This happens when driving over a bump forces the tires to turn left or right without you moving the steering wheel. Engineers work hard to eliminate this.
- Steering Feel vs. Handling: Steering feel is what you personally sense in your hands, while handling is how the car actually behaves on the track.
